HySociaTea
Hybrid Social Teams for Long-Term Collaboration in Cyber-Physical Environments
Dr. rer. nat. Sirko Straube
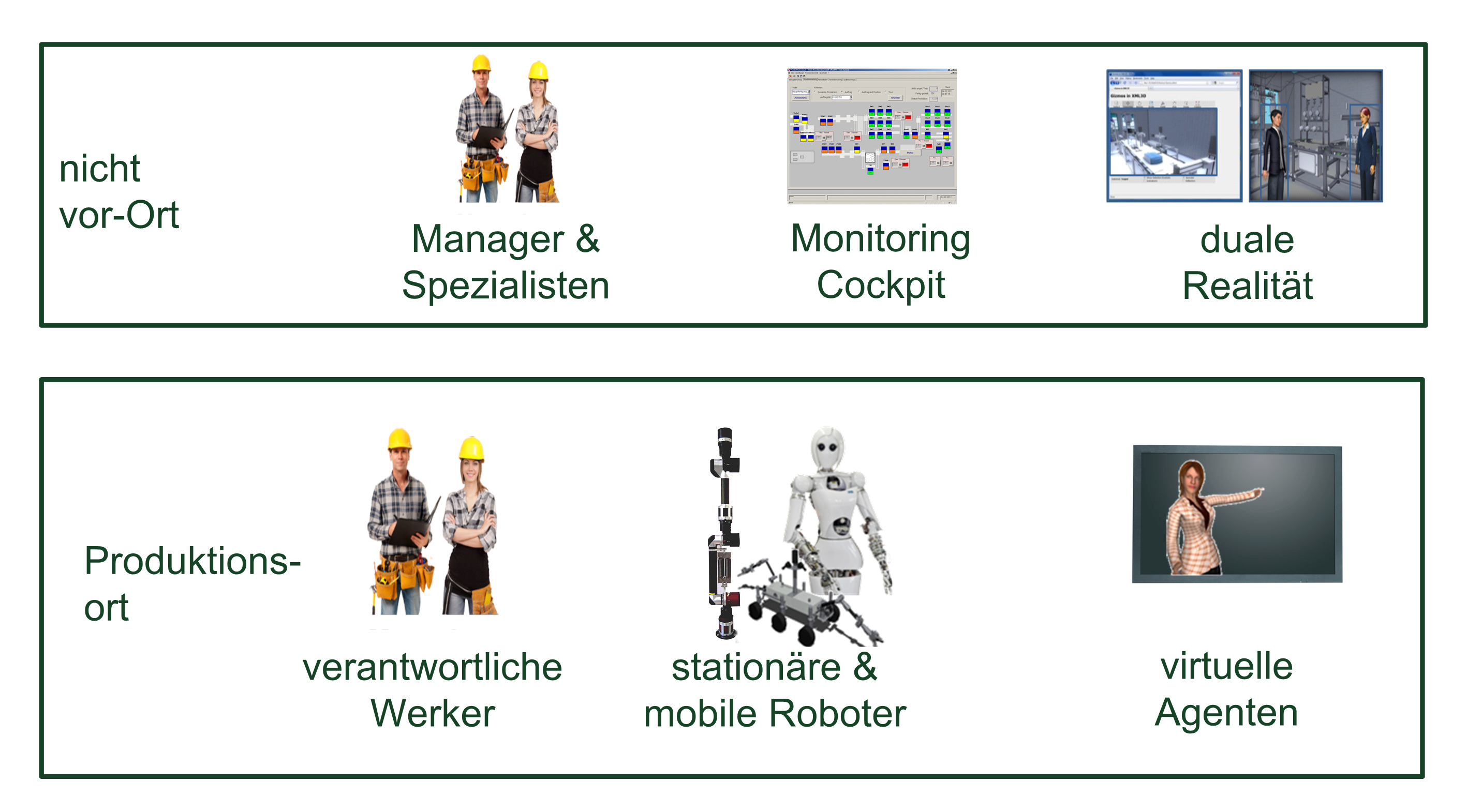
Das Projekt HySociaTea ist ein Kooperationsprojekt verschiedener Fachbereiche der DFKI GmbH und bündelt die Kompetenzen im Gesamtspektrum der Künstlichen Intelligenz. Eingebettet in das Zukunftsprojekt Industrie 4.0 ist HySociaTea ein F&E-Vorhaben, welches die Entwicklung flexibler Produktions- und Missionsabläufe ermöglicht. Der Grundgedanke in HySociaTea ist, dass in zukünftigen Produktionsumgebungen Roboter und virtuelle Agenten zusammen mit Menschen in einem Team zusammenarbeiten, welches dann flexibel auf die jeweiligen Anforderungen reagieren kann. Das Vorhaben schafft hierbei die Basis, in dem es sich auf den Aufbau, Kommunikation und die Rollenverteilung in einem solchen hybriden Team konzentriert.
| Laufzeit: | 01.09.2014 bis 31.08.2016 |
| Zuwendungsempfänger: | Deutsches Forschungszentrum für Künstliche Intelligenz GmbH |
| Fördergeber: | Bundesministerium für Bildung und Forschung |
| Förderkennzeichen: | Gefördert vom Bundesministerium für Bildung und Forschung, Förderkennzeichen 01IW14001. |
| Anwendungsfelder: | Assistenz- und Rehabilitationssysteme |
| Verwandte Projekte: |
SemProM
Semantic Product Memory
(02.2008-
01.2011)
|
| Verwandte Robotersysteme: |
AILA
Mobile Dual-Arm-Manipulation
ARTEMIS
DLR SpaceBot Cup 2013 Rover
COMPI
Compliant Robot Arm
ARTEMIS
DLR SpaceBot Cup 2013 Rover
AILA
Mobile Dual-Arm-Manipulation
COMPI
Roboterarm mit nachgiebiger Regelung
|
| Verwandte Software: |
ARC-OPT
Adaptive Robot Control using Optimization
ARC-OPT
Adaptive Robot Control using Optimization
|
Projektdetails
Im Zusammenhang mit dem Zukunftsprojekt Industrie 4.0 ermöglichen diese hybriden Teams z.B. eine flexible Produktion, in der auch auf ungeplante Ereignisse durch eigenständige Reorganisation des Teams reagiert werden kann. Neben der Erforschung der reinen technischen Grundlagen, liegt der Schwerpunkt auch auf der Entwicklung von robotischen Teamkompetenzen, sowie auf intelligentem Multi-Agenten-Verhalten, welche auch wichtige Aspekte in rein menschlichen Teams sind. Technische Systeme sollen hier vor allem als Assistenzsystem für den Menschen in der Produktion eingesetzt werden – die Roboter müssen also als Partner im Gesamtprozess wahrgenommen werden.
Der in HySociaTea entwickelte und untersuchte hybride Teamaufbau kann auf lange Sicht in unterschiedlichen realen Herausforderungen eingesetzt werden, z.B. bei modularen Produktionsanlagen in der Fabrik der Zukunft, als Rettungsteam bei Katastrophenszenarien, oder bei der notwendigen Arbeitsteilung zwischen Menschen und Maschinen beim sicheren Rückbau von Atomkraftwerken.
Zur Realisierung des Projekts bündeln verschiedene Fachbereiche aus allen DFKI-Standorten (Bremen, Kaiserslautern, Saarbrücken) ihre Kompetenzen:
- RIC (Robotics Innovation Center, DFKI Bremen): autonome und kooperative Robotersysteme, mobile Manipulation
- CPS (Cyber-Physical Systems, DFKI Bremen): sichere Mensch-Roboter Interaktion
- EI (Embedded Intelligence, DFKI Kaiserslautern): technische Einbindung des Menschen, tragbare Sensorik
- AV (Augmented Vision, DFKI Kaiserslautern): Perzeptionsmodule mittels Bildverarbeitung und Sensorfusion
- KM (Knowledge Management, DFKI Kaiserslautern): blickgesteuerte Aufmerksamkeitserkennung, Realzeit-Objekterkennung
- IUI (Intelligent User Interfaces, DFKI Saarbrücken): emo-soziale virtuelle Charaktere, multimodale Dialogplattform
- LT (Language Technology Lab, DFKI Saarbrücken): autonome Teamreorganisation, Sprachinteraktion
- ASR (Agents and Simulated Reality, DFKI Saarbrücken): Kommunikations-Middleware, Dual Reality
Videos
HySociaTea: Ausgewählte Highlights der finalen Projektdemo

Dieses Video zeigt ausgewählte Technologien im HySociaTea-Szenario: das Resourcenplanungsmodul, die Objekterkennung anhand der Eyetracker-Information beim Werker, die Sprach-Interaktion mit den Robotern und dem virtuellen Charakter Gloria, die autonomen Sequenzen der Roboter und die autonome Roboter-Roboter Interaktion.
HySociaTea: Autonome Roboter-Roboter Kollaboration zwischen Compi und AILA

Das Video zeigt die autonome Roboter-Roboter Kollaboration in HySociaTea unter Nutzung des TECS-Framework. Der Roboter Compi nimmt das Werkstück und meldet, dass eine Abholung nötig wird. AILA erkennt, dass sie diese Aufgabe ausführen kann und übernimmt. Bei der Übergabe gibt es ein Kommunikationsprotokoll zwischen beiden Robotern.
HySociaTea: Szenario Maßgefertigte Verpackung

Das Video zeigt den ersten Demo-Aufbau und Ablauf mit dem Hybriden Team.