Roboterdame AILA zeigt in Hannover ein Zukunfts-Szenario auf der internationalen Raumstation ISS: Menschenähnliche Hände und eine von DFKI-Forschern neu entwickelte Software ermöglichen ihr, teilautonom und feinmotorisch zu arbeiten. Sie legt Hebel am Armaturenbrett um und aktiviert Knöpfe, um z.B. bestimmte Bordsysteme anzuschalten. So könnte sie spontan und eigenständig Astronauten unterstützen oder in gefährlichen Operationen ersetzen.
Die 1,70 Meter große Roboterdame hat einen beweglichen Torso mit vier Gelenken, die Arme verfügen über jeweils sieben Gelenke. AILA bewegt sich auf einer sechsrädrigen mobilen Plattform. Das System ist nicht nur planbasiert gesteuert, sondern reagiert auch auf Reize von außen. Leichte Berührungen mit Gegenständen oder Menschen zeigen ihr Grenzen des Handlungsspielraums auf. So kann sie sicher mit Menschen zusammenarbeiten und sich stetig ändernden Umgebungen anpassen. Die benötigte Hardware für die Rechenleistung ist vollständig im Roboterkörper integriert. Das ermöglicht den flexiblen Einsatz in beliebigen Räumlichkeiten.
Aktuell arbeiten die Wissenschaftler vor allem an AILAs Lernfähigkeiten: Eine Lernplattform soll dem Roboter künftig ermöglichen, menschliche Bewegungen des Oberkörpers, der Arme sowie der Hände nachzuahmen und abzuspeichern. Stößt AILA auf eine unvorhersehbare Aufgabe, die sie nicht allein lösen kann, hilft der Mensch aus der Ferne. Im Labor führt er Bewegungen aus, die das System übernimmt. Sogenannte Motion-Tracking-Kameras zeichnen die menschliche Bewegung auf. Dann zerlegt die Lernplattform den Bewegungsablauf automatisch in einzelne Segmente. In einer Simulation wird die Abfolge reproduziert, geprüft und auf die Roboterdame übertragen.
Die Lernansätze, Planungsverfahren und Reflexe sollen in eine verhaltensbasierte Softwarearchitektur integriert werden. Die Architektur steuert die Bewältigung der gegenwärtigen Aufgabe und erlaubt gleichzeitig angemessene Reaktionen auf plötzliche Veränderungen der Umgebung. Diese werden über verschiedene Sensoren wahrgenommen.
DFKI-Forscher entwickelten AILAs Fähigkeiten in den Projekten:
SemProm: www.semprom.org
Robofoot
BesMan
Stand-Koordinaten
CeBIT 2013, Halle 9, Stand F50
News
DFKI Robotics Innovation Center mit Roboterdame AILA auf der CeBIT 2013
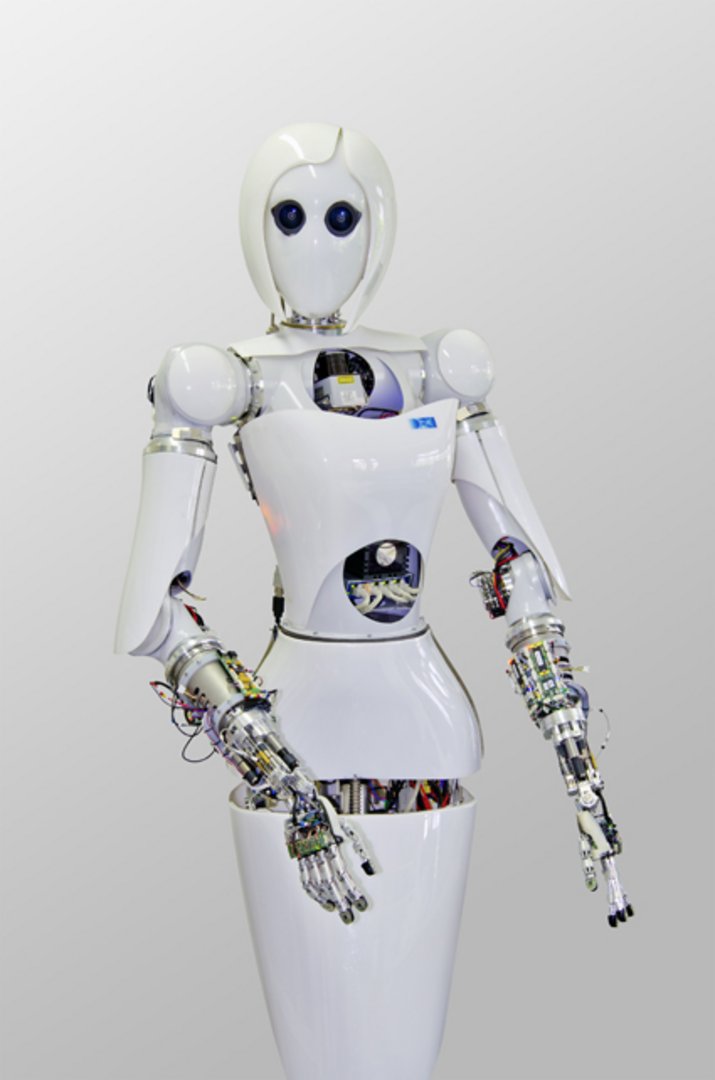
Foto: DFKI GmbH/David Schikora