Robofoot
Smart robotics for high added value footwear industry

The ROBOFOOT project addresses the urgent need for intelligent solutions to automate complex and still mostly manual processes in industrial production. In this case, the project ROBOFOOT aims at introducing robotics on the manufacturing of footwear, which is still mainly handcrafted. The project develops robotic solutions to optimize and automate the production process in order to allow higher quality products at competitive prices. The target area is the production of fashion and other high added value shoes where Europe still maintains its leadership. ROBOFOOT brings together a consortium composed of 10 institutions from 3 European countries (Italy, Spain and Germany).
| Duration: | 01.09.2010 till 28.02.2013 |
| Donee: | German Research Center for Artificial Intelligence GmbH |
| Sponsor: | European Union |
| Grant number: | Funded by the European Commission; Grant agreement No. 260159 under the Call FP7-2010-NMP-ICT-FoF |
| Partner: | TEKNIKER (Koordinator) (SP), CNR (IT), INESCOP (SP), COMAU (IT), ROBOTNIK (SP), QDESIGN (IT), AYCN (SP), PIKOLINOS (SP), ROTTA (IT) |
| Application Field: | Logistics, Production and Consumer |
| Related Robots: |
AILA
Mobile Dual-Arm-Manipulation
|

Project details
Footwear industry in Europe is one of the most important sectors in terms of the number of people employed.
A large part of the production of such shoes is still handcrafted. One of the main difficulties to automate this area is the high number of products variants due to a large number of models, sizes, and colors. Additionally, footwear manufacturing requires complex manufacturing and assembly processes as well as extensive labour demand during quality and packaging operations.
Although there have been attempts in the past that tried to incorporate robotic solutions in this sector, they did not succeed in the objective (except for specific operations, as, for instance, related to the injection process) probably because it was too early and the technology available and its cost were not adequate for the footwear industry. Robofoot will demonstrate that it is feasible nowadays.
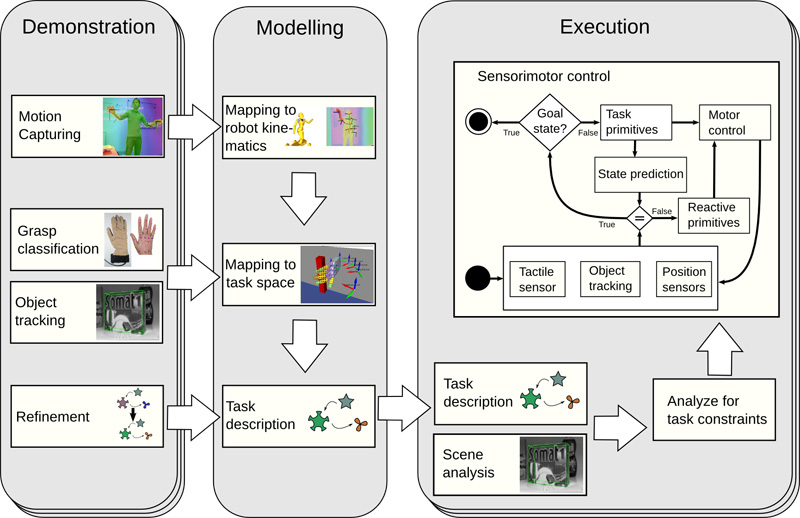
Within the project, DFKI-RIC will address mainly the problem of manipulating shoes, which as deformable objects require of high levels of dexterity. More specifically, DFKI-RIC will evaluate the use of multi-fingered hands and dual-arm robots in these scenarios. In order to provide the robot with flexibility, a learning component will allow the possibility to learn new manipulation skills and task sequencing.
Website: http://www.robofoot.eu/
Videos
AILA: Robofoot

Programming Arm Motions and Multifinger Grasping by Operator Demonstration