Robofoot
Smart robotics for high added value footwear industry

Im Mittelpunkt des Robofoot-Projektes steht der Wunsch nach intelligenten Lösungen zur Automatisierung von komplexen und noch weitgehend manuellen Fertigungsprozessen bei der industriellen Produktion. Ziel ist in diesem Fall, die Herstellung von Schuhen, die immer noch hauptsächlich Handarbeit ist, durch robotische Lösungen zu unterstützen. Der Produktionsprozess soll optimiert und automatisiert werden, um dadurch qualitativ hochwertige Produkte zu konkurrenzfähigen Preisen herzustellen. Das Projekt richtet sich an die Hersteller von modischen und hochpreisigen Schuhen, ein Sektor, auf dem Europa immer noch eine führende Rolle einnimmt. Robofoot bringt ein Konsortium zusammen, das sich aus zehn Institutionen aus drei europäischen Ländern (Italien, Spanien und Deutschland) zusammensetzt.
| Laufzeit: | 01.09.2010 bis 28.02.2013 |
| Zuwendungsempfänger: | Deutsches Forschungszentrum für Künstliche Intelligenz GmbH |
| Fördergeber: | Europäische Union |
| Förderkennzeichen: | Gefördert von der Europäischen Kommission, Fördernummer 260159; FP7-2010-NMP-ICT-FoF |
| Partner: | TEKNIKER (Koordinator) (SP), CNR (IT), INESCOP (SP), COMAU (IT), ROBOTNIK (SP), QDESIGN (IT), AYCN (SP), PIKOLINOS (SP), ROTTA (IT) |
| Anwendungsfelder: | Logistik, Produktion und Consumer |
| Verwandte Robotersysteme: |
AILA
Mobile Dual-Arm-Manipulation
AILA
Mobile Dual-Arm-Manipulation
|

Projektdetails
Hinsichtlich der Anzahl der Beschäftigten zählt die Schuhindustrie zu den wichtigsten Wirtschaftszweigen in Europa.
Diese Art von Schuhen wird noch größtenteils handgefertigt. Die große Anzahl unterschiedlicher Produkte aufgrund der vielen verschiedenen Modelle, Größen und Farben machen eine Automatisierung des Produktionsprozesses ausgesprochen schwierig. Zusätzlich sind die Fertigungsverfahren bei der Schuhherstellung sehr komplex, und der Arbeitskräftebedarf während der Qualitätskontrolle und den Verpackungsprozessen ist groß.
Es gab zwar bereits in der Vergangenheit Versuche, in diesem Wirtschaftszweig robotische Lösungen einzusetzen, diese waren jedoch – abgesehen von speziellen Arbeitsvorgängen, wie z.B. im Zusammenhang mit Spritzgießvorgängen - nicht erfolgreich. Der Grund hierfür war möglicherweise, dass die Technologie - und die damit verbundenen Kosten - noch nicht reif genug für die Fußbekleidungsindustrie waren. Robofoot soll beweisen, dass diese Lösung heutzutage realistisch ist.
Im Rahmen des Projektes wird sich das DFKI-RIC hauptsächlich mit der Verarbeitung von Schuhen beschäftigen, welche als verformbare Objekte ein hohes Maß an Geschicklichkeit erfordern. Hier soll am DFKI-RIC der Einsatz von mehrfingrigen Händen und zweiarmigen Robotern in diesen Szenarios untersucht werden. Um flexibel einsetzbar zu sein, soll eine Lernkomponente es dem Roboter ermöglichen, Arbeitsschritte und motorische Fähigkeiten zur Manipulation zu erlernen.
Webseite: http://www.robofoot.eu/
Videos
AILA: Robofoot

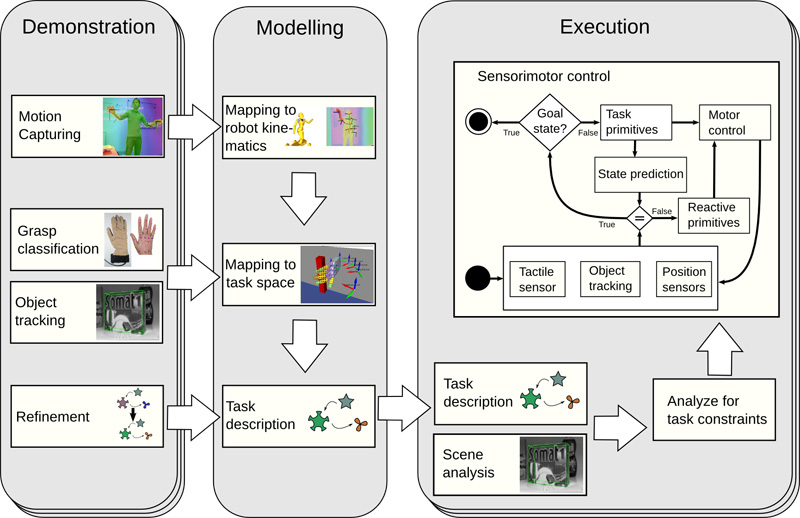
Programmierung von Armbewegungen und Greifen mit mehreren Fingern nach Operator Demonstration.