MODKOM
Modular components as Building Blocks for application-specific configurable space robots
For service operations on satellites or the exploration of foreign planets, robotic systems will be of particular interest in the future, as they are relatively inexpensive compared to manned space flight and at the same time flexible enough to react to unforeseen events. So far, however, the solutions developed and used are highly mission-specific and therefore highly specialized. The definition of standards and modules should enable a rapid response to future exploration and service missions. In the project described here the focus is on the technological, mechatronic and software development of modular functional units for reconfigurable and mobile robot systems. The performance of the modules developed in this project will be demonstrated by the realization of a mobile manipulation system. For this purpose, existing functional units that are indispensable for exploration missions will be used within the project and further developed in such a way that an increase of the TRL will take place. If a pool of functional units is available, robotic systems can be reconfigured according to the task based on the modular system.

Project details

The MODKOM project presented here will focus on the technological, mechatronic and software development of modular functional units for reconfigurable robot systems that can be used in various space missions. With the application of artificial intelligence methods, the modules should be able to act autonomously and react to unforeseen events.
The performance of the methodology and modules ( further ) developed in this project will be demonstrated by the realization of a complex mobile manipulation system.
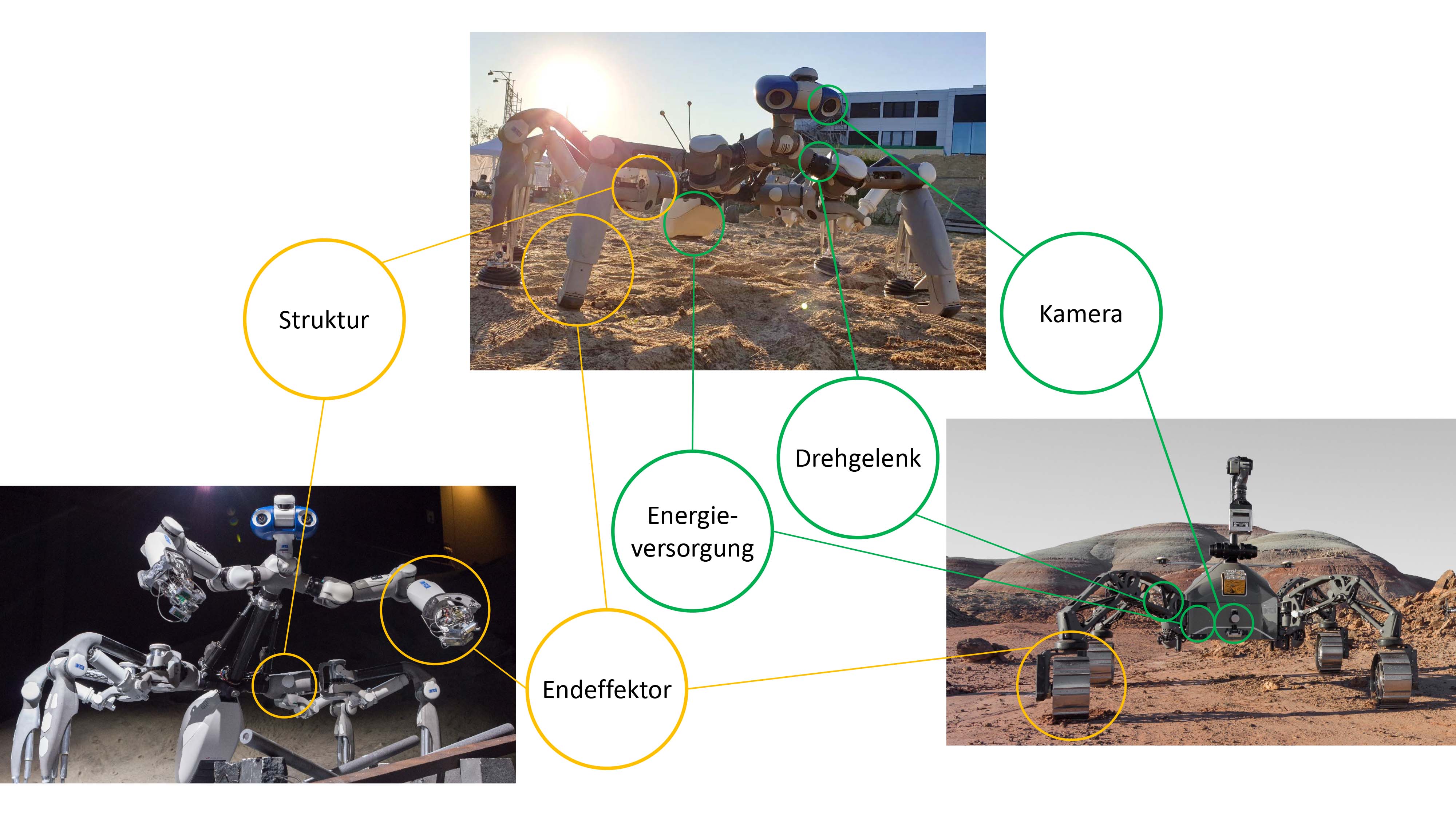
Not only the functionality of the selected modules shall be demonstrated, but also their smooth interaction in an exemplary assembled mobile articulated chain.
These types of modules are of particular benefit and interest, for example, for performing service operations on satellites in orbit or exploring the surfaces of alien planets robotic systems are less risky and relatively inexpensive compared to manned spaceflight. So far, the solutions developed and used are highly mission-specific and thus highly specialized. With the help of the results from MODKOM as well as the definition of norms, standards and modules, solutions can be flexibly configured in the future and adapted to new or changing requirements for the overall system with little effort, without having to carry out a completely new development every time.
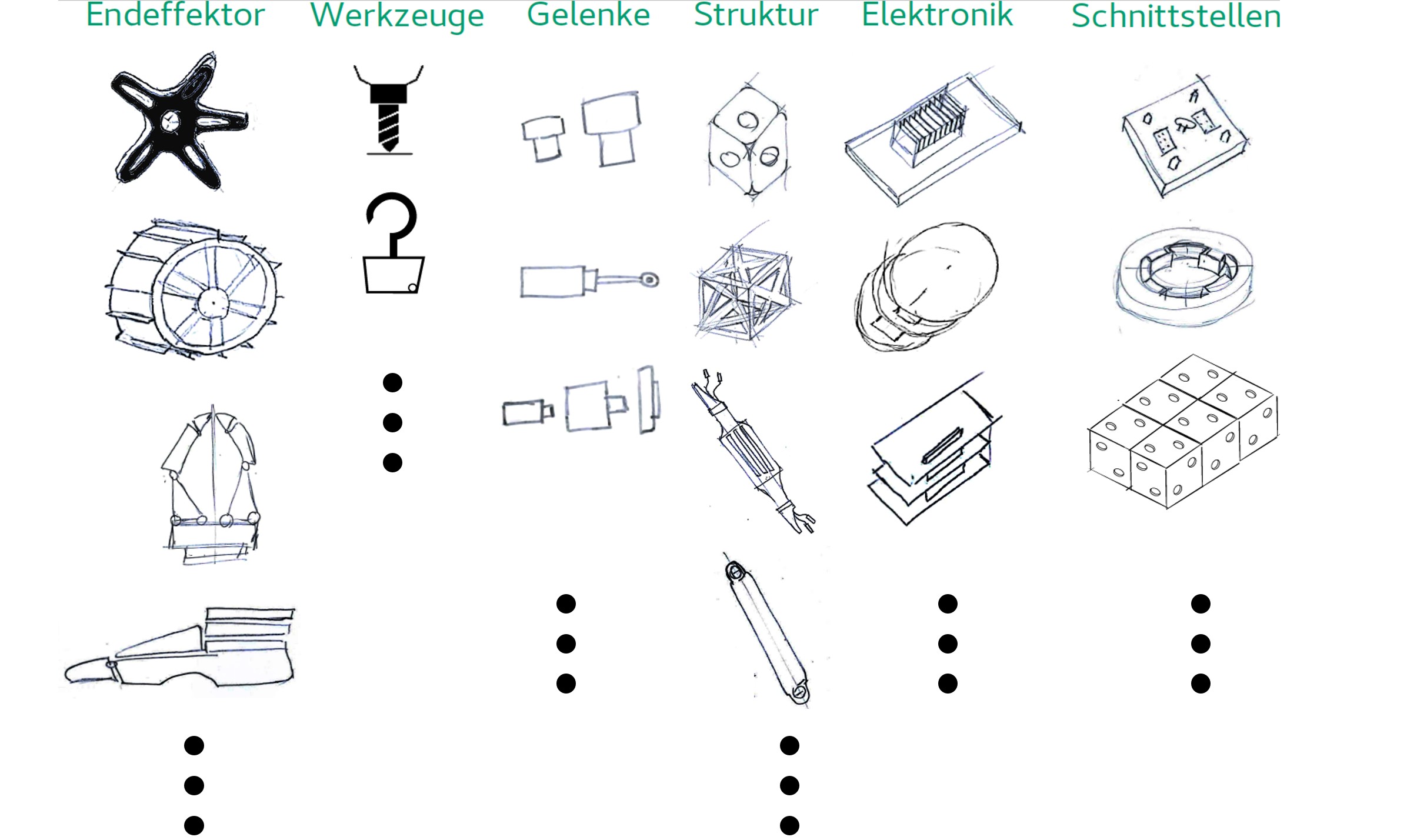
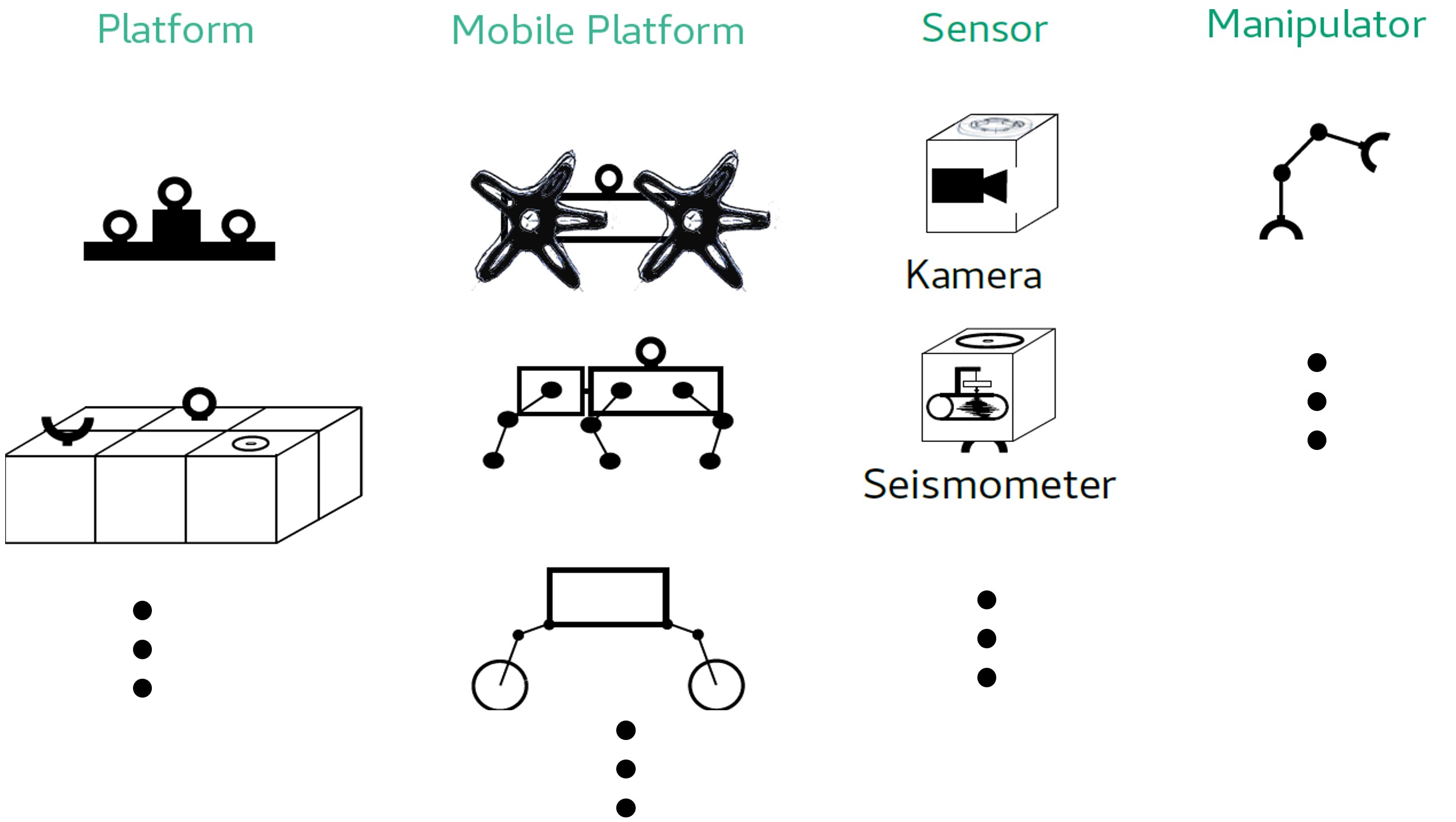
In MODKOM, existing functional units that are indispensable for robotic space missions are identified and further developed in such a way that a kind of plug-and-play solution can be provided via an interface in terms of both software and hardware. If existing modules do not provide a required functionality, existing entities will be modified accordingly. Once a pool of functional entities is available, robotic systems can be reconfigured according to the task based on the modular system. These entities can be formally described to enable, for example, the use of learning and optimization methods to generate and evaluate appropriate configurations, with respect to specific requirements.
Based on already gained knowledge and competences in projects carried out so far as well as available results of external developments, the project team wants to carry out the work in MODKOM and thus achieve the ambitious project goals.