HARTU
Handling with AI-enhanced Robotic Technologies for flexible ManUfacturing

HARTU develops components for the automatic planning and control of gripping and assembly processes in robotics, as well as innovative gripping concepts based on electroroadhesion. The goal is to make industrial manufacturing more efficient, flexible and reconfigurable. The main technological goals are self-supervised identification and control of gripping strategies, learning and control of robotic assembly techniques, AI-based multimodal perception for visual control and monitoring of handling operations, and development of versatile soft grippers with electro-active fingertips. The technologies will be evaluated in 5 different industrial scenarios: Kitting, Assembly, Sorting, Packaging, and machine tending.

Project details

The handling of parts in manufacturing environments is a concatenation of some of these basic actions: part grasping, manipulation, transportation, and release. In highly automated lines, each of these actions is done by special machines or by means of robots that are programmed ad-hoc. Grasping devices, using several working principles (prehension, vacuum, magnetism, etc.) are selected for each part or family of similar parts, introducing tool exchangers when required. Reconfiguration of these lines has a high economic cost and is time consuming.
Moreover, when flexibility is required due to the variability of products to be handled, a highly unstructured environment, or the very delicate nature of products this approach is not feasible. In those cases, manual handling is the adopted solution.
For this reason, HARTU provides components for automatic planning and control of grasping, release and contact assembly tasks, and proposes innovative gripping concepts based on electroadhesion for the handling of many different products. These components are integrated through a reference architecture and supported by perception capabilities and application development support tools, with the overall goal of making manufacturing lines more efficient, flexible, and reconfigurable.
In HARTU, DFKI is primarily concerned with learning and controlling robotic assembly skills that involve a variety of different contact situations. Therefore, motion sequences and contact wrenches shall be learned from human demonstrations and generalized with respect to novel situations. The acquired skills will be generic; the robot control parameters shall adapt automatically to the current contact situation.
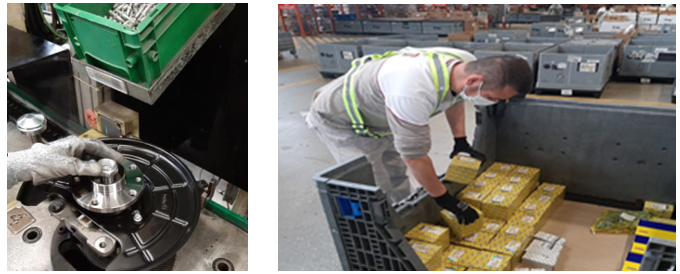
The developed methods will be demonstrated in the mass production of consumer goods, in this case electric razors, at Philips Consumer Lifestyle B.V.. They are intended to make assembly lines more flexible and easier to reconfigure.