Die Umgebung erkennen, Veränderungen darin wahrnehmen, und die Handlungsweise bei der Erledigung einer Aufgabe daran anpassen: Autonome Systeme sollen sich schnell auf unvorhergesehene Situationen einstellen und in diesen agieren können. Dafür müssen sie in der Lage sein, ihre Verhaltensmodelle auf die vorhandene Hard- und Software abzustimmen und sich somit dynamisch zu rekonfigurieren. In dem vom BMBF geförderten Projekt D-Rock befassen sich Forscher des DFKI mit der Standardisierung des Entwicklungsablaufes auf allen Ebenen eines autonomen Systems: vom Hardwaredesign, über die Elektronikentwicklung bis zur Software und Verhaltensmodellierung. Dabei stellt D-Rock auch einen neuen verbesserten Standard zu Roboterbetriebssystemen wie ROS dar. Der Design-Ansatz soll bei den hoch komplexen Robotersystemen der nächsten Generation zur Anwendung kommen, die als autonome Systeme in unbekannten und unstrukturierten Umgebungen eingesetzt werden, und die Fähigkeiten heutiger Systeme weit übertreffen.
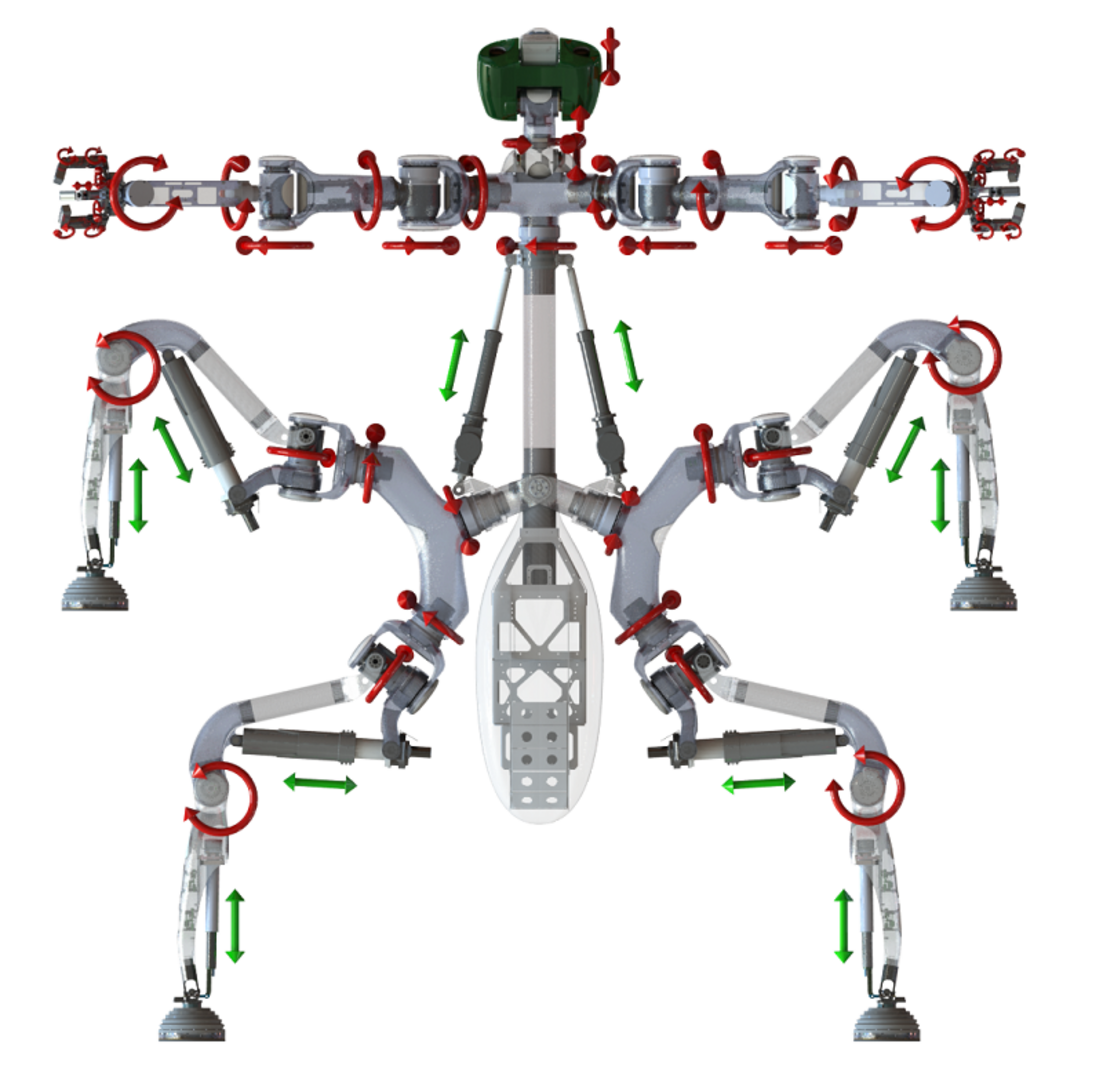
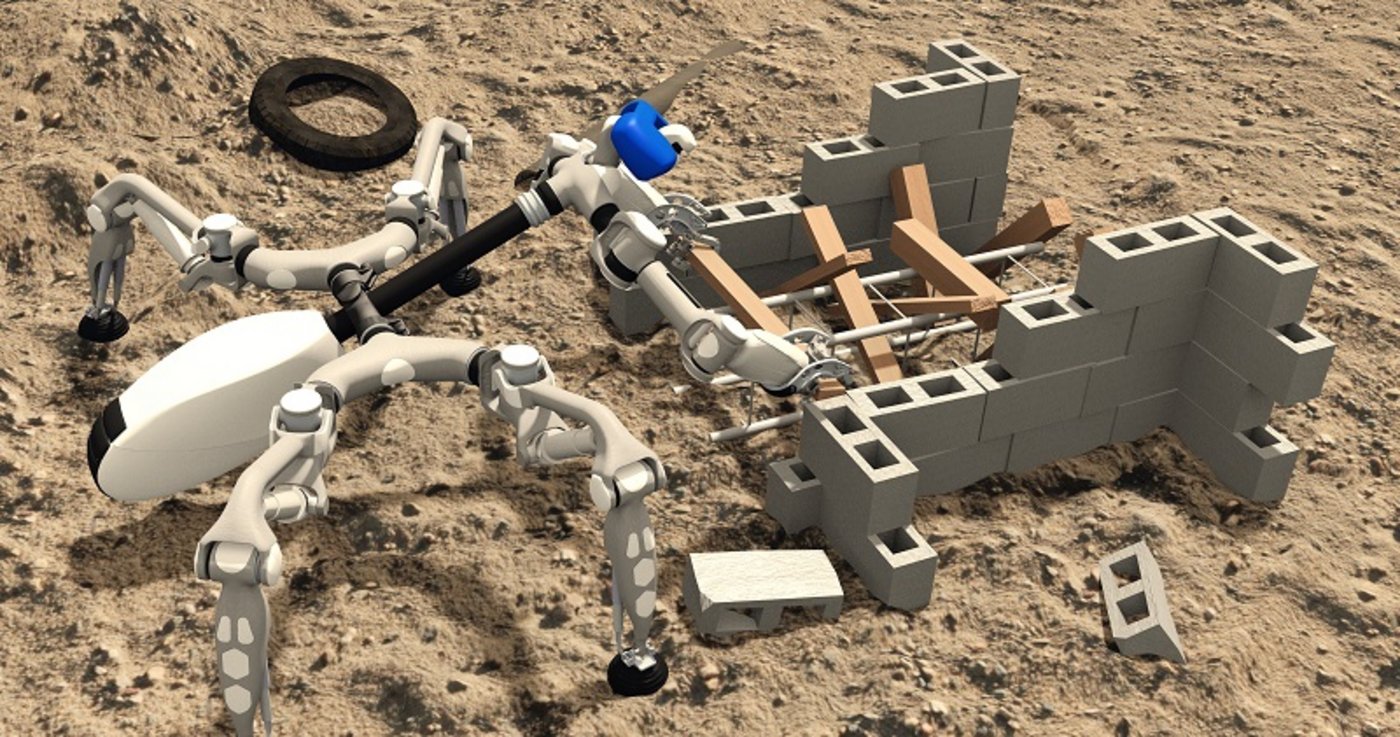
Demonstriert wird D-Rock anhand von MANTIS, einem mehrgliedrigen Laufroboter (Größe LxBxH: 2,5 m x 2,5 m x 1,85 m), der als mobiler Manipulator in dem vom DLR geförderten Vorhaben LIMES (FKZ 50RA1218 & 50RA1219, BMWi) entwickelt wurde. Sein flexibler und adaptiver Bewegungsapparat ermöglicht einen hohen Grad an Mobilität auf unebenen und unstrukturierten Oberflächen. Die vorderen beiden Extremitäten können zum Laufen und als Manipulatoren eingesetzt werden. Greifwerkzeuge, welche mit einer multimodalen Sensorik ausgestattet sind, ermöglichen die durch taktile Wahrnehmung gestützte Handhabung von Objekten. MANTIS ist in der Lage, autonom in unterschiedlichen Einsatzgebieten zu agieren: Er kann Objekte bewegen und so beispielsweise bei Katastropheneinsätzen in schwer zugänglichem Gelände bei der Rettung Überlebender helfen. Auf der HANNOVER MESSE gibt MANTIS einen ersten Eindruck von seinen Fähigkeiten: in einem Katastrophenszenario räumt er selbstständig Geröll aus dem Weg. Außerdem können Besucherinnen und Besucher mit Hilfe spezieller Marker selber mit dem Roboter interagieren.
DFKI-Kontakt
Prof. Dr. Frank Kirchner
Deutsches Forschungszentrum für Künstliche Intelligenz (DFKI) GmbH
Robotics Innovation Center
Robert-Hooke-Straße 1
D-28359 Bremen
Telefon: +49 421-178 45 4100
E-Mail: Frank.Kirchner(at)dfki.de
DFKI-Pressekontakt
Team Unternehmenskommunikation Bremen
Telefon: +49 421 17845 4180
Mobil: +49 176 320 455 83
E-Mail: uk-hb(at)dfki.de