MANTIS
Mehrbeiniges Manipulations- und Lokomotionssystem

{kind=link}
Technische Details
| Größe: | 2,96 m x 1,84 m x 0,32 m (Laufhaltung) |
| Gewicht: | ca. 107 kg |
| Stromversorgung: |
LiPo Primärbatterie: 45,6 V und 10 Ah
|
| Geschwindigkeit: | ca. 3,6 km/h |
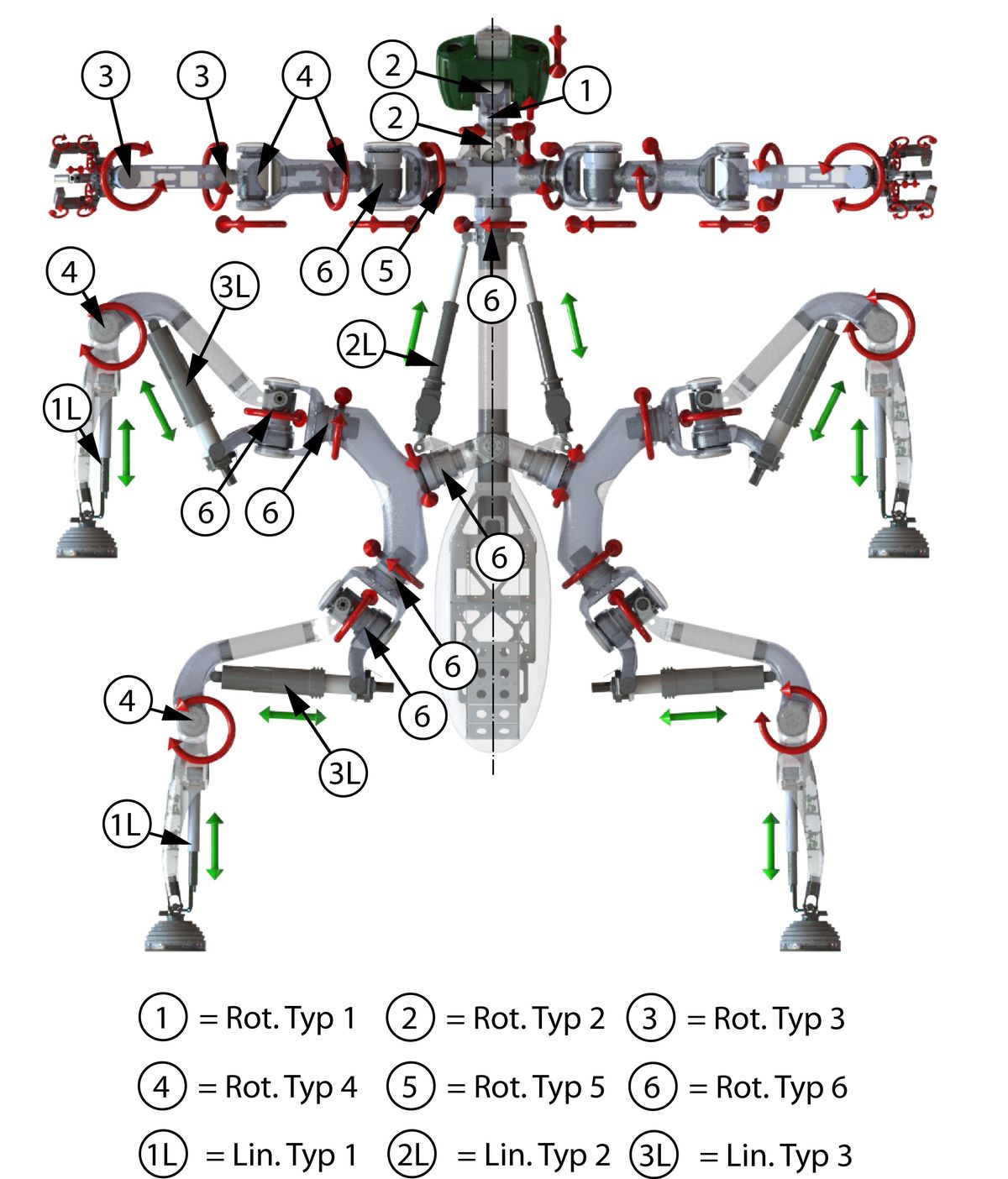
| Antrieb/ Motoren: |
- Beine: 4 x 6-DOF
- Arme: 2 x 6-DOF
- Hände: 2 x 8-DOF
- Torso: 5-DOF
- Kopf: 4-DOF
- Rotationsantriebe in den Armen, Beinen und Kopf: Bürstenlose DC Motoren mit Harmonic Drive Getriebe.
- Linearantriebe in den Beinen: Bürstenlose DC Motoren mit Kugelumlaufspindeln.
- Linearantrieb im Torso: DC Motoren mit Planetengetriebe und Trapezgewindespindel.
|
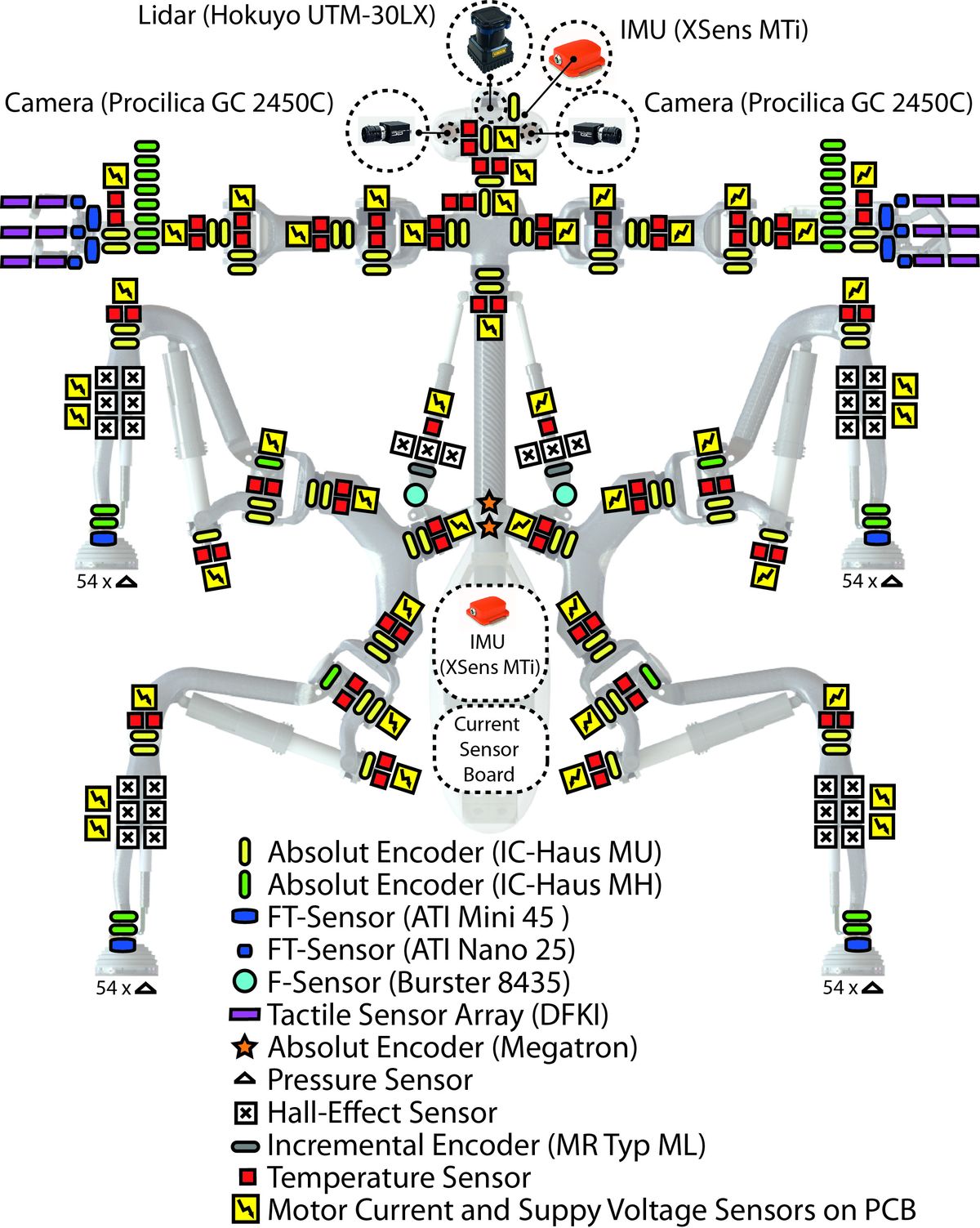
| Sensoren: |
- Laserscanner: Hokuyo UTM-30LX
- Stereokamerasystem: 2 x Procillica GV 2450C
- IMU: 2 x XSens MTi
- 122 Temperatursensoren
- 191 Sensoren für die Strommessung
- 12 Taktile Sensorfelder mit jeweils 40 Sensorelementen
- 88 Rotations-Absolutwertgeber
- 14 Sechs-Achs-Kraft-Drehmoment-Sensoren
|
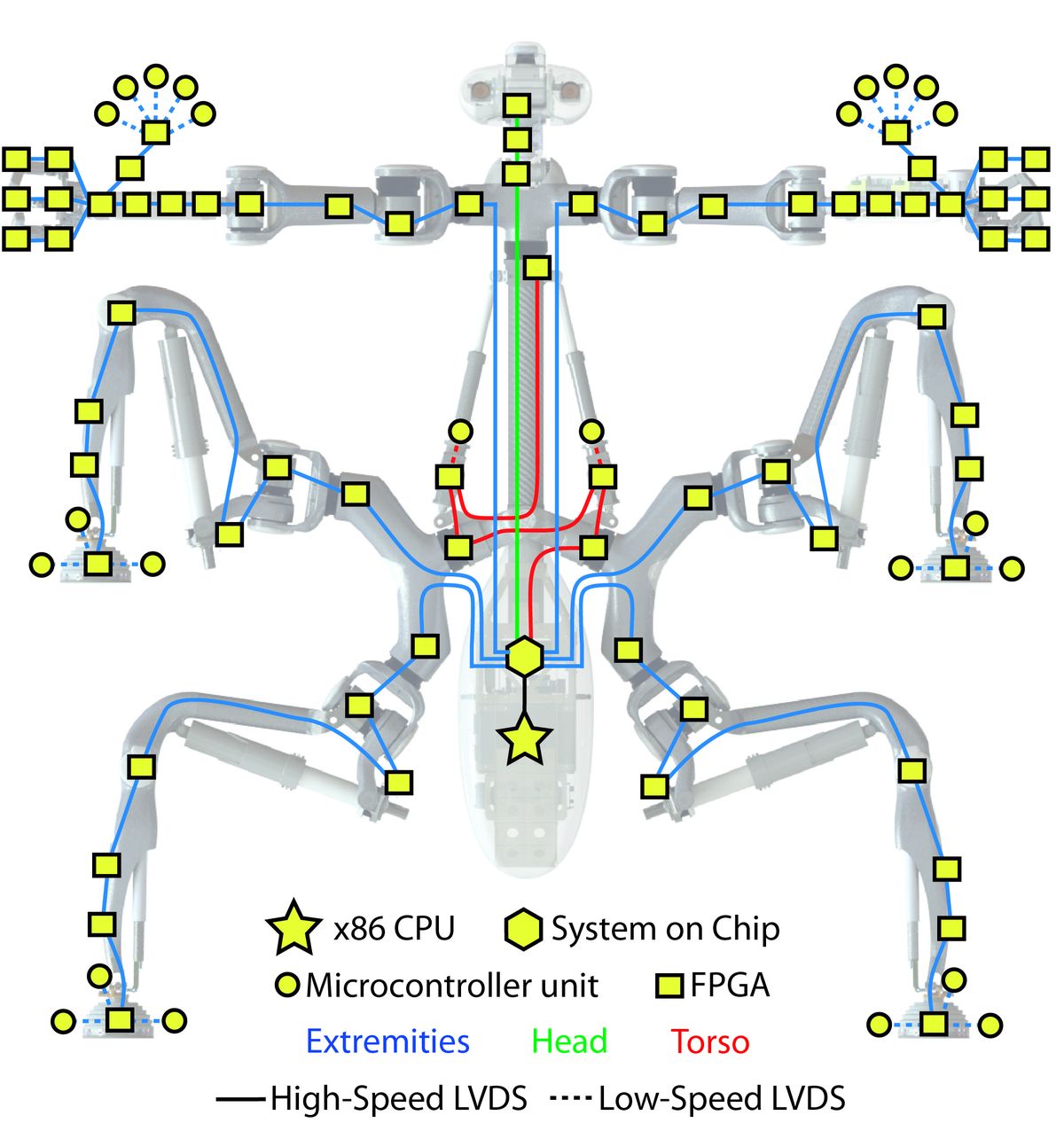
| Kommunikation: |
Jeweils unabhängiges LVDS- System für die Regelung der beiden Arme, der vier Beine, des Kopfes sowie des Torsos.
|
| Motorelektronik: |
DFKI Motorelektronik für alle Antriebe:
- Eingangsspannung: 12V-54V
- FPGA- Spartan 6:XC6SLX45
- Serielle Kommunikation für Spartan-6 (320MSym/s)
- Sinuskommutierung
- 2x LVDS für lokale Sensorik
- 2x Anschlüsse für IC Haus MU
- 4x Status LED via
|
Organisatorische Details |
|
| Partner: |
Universität Bremen |
| Fördergeber: |
Bundesministerium für Wirtschaft und Klimaschutz
Deutsches Zentrum für Luft- und Raumfahrt e.V. |
| Förderkennzeichen: | Gefördert von der Raumfahrt-Agentur des Deutschen Zentrums für Luft- und Raumfahrt e.V. mit Mitteln des Bundesministeriums für Wirtschaft und Klimaschutz aufgrund eines Beschlusses des Deutschen Bundestages unter dem Förderkennzeichen 50 RA 1218. |
| Anwendungsfelder: |
Weltraumrobotik
SAR- & Sicherheitsrobotik Logistik, Produktion und Consumer |
| Verwandte Projekte: |
NoStrandAMust
Learning Ground Interaction Models to Increase the Autonomy of Mobile Robotic Exploration Systems
(02.2022- 01.2025)
NoStrandAMust
Lernen von Bodeninteraktionsmodelle zur Erhöhung des Autonomiegrades mobiler Explorations-Robotersysteme
(02.2022- 01.2025)
PRO-ACT (OG11)
Planetary RObots Deployed for Assembly and Construction Tasks
(02.2019- 04.2021)
BesMan
Behaviors for Mobile Manipulation
(05.2012- 07.2016)
D-Rock
Modelle, Verfahren und Werkzeuge für die Modelbasierte Softwareentwicklung von Robotern
(06.2015- 05.2018)
LIMES
Lernen intelligenter Bewegungen kinematisch komplexer Laufroboter für die Exploration im Weltraum
(05.2012- 04.2016)
|
| Verwandte Robotersysteme: |
SpaceClimber
Expandable Rover for Planetary Applications
Charlie
iStruct Demonstrator
|
| Verwandte Software: |
ARC-OPT
Adaptive Robot Control using Optimization
ARC-OPT
Adaptive Robot Control using Optimization
Bagel
Biologically inspired Graph-Based Language
MARS
Machina Arte Robotum Simulans
Phobos
Ein Blender-Add-On zum Editieren und Export von Robotermodellen für die MARS-Simulation
Rock
Robot Construction Kit
|


Systembeschreibung
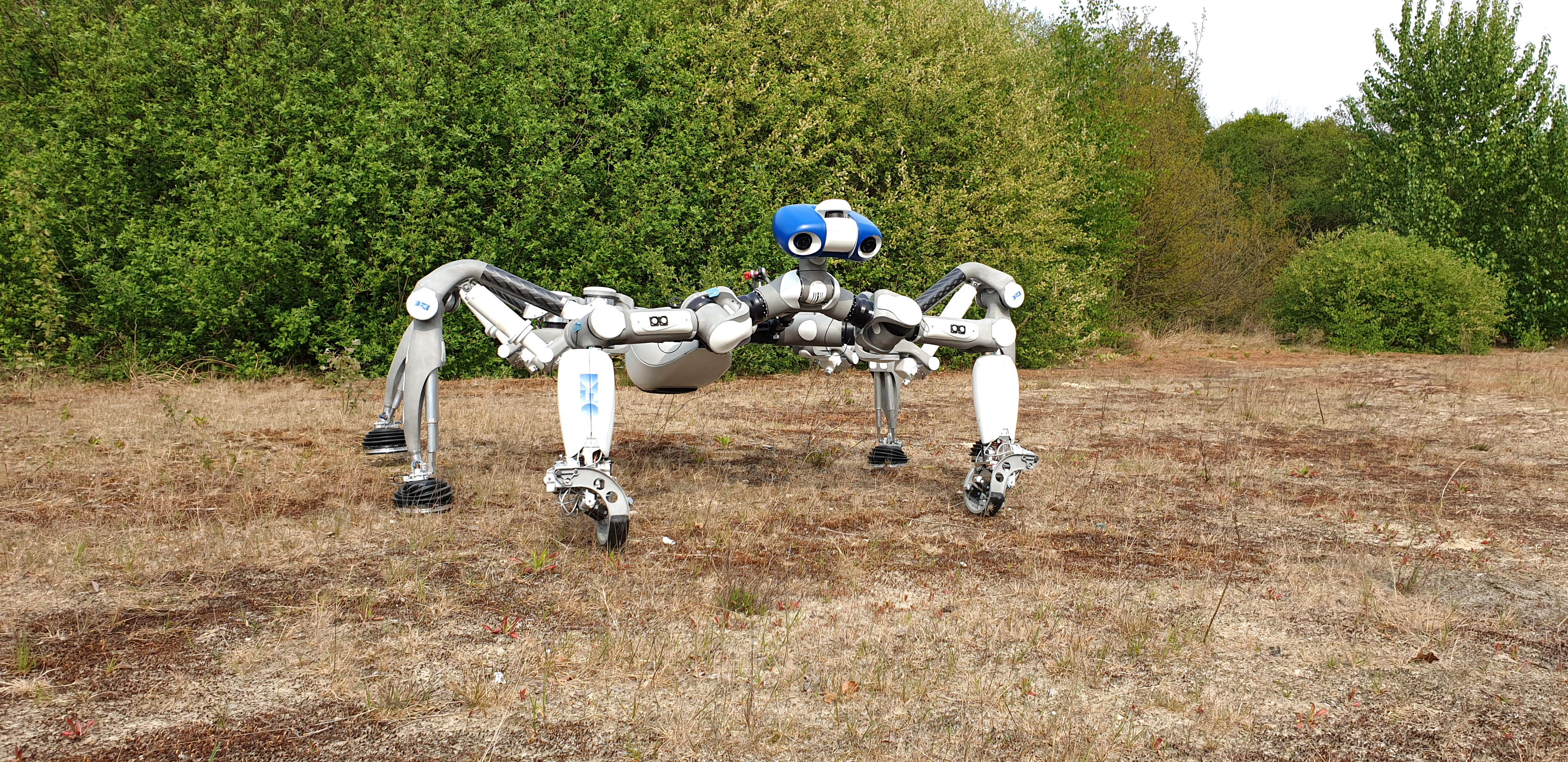

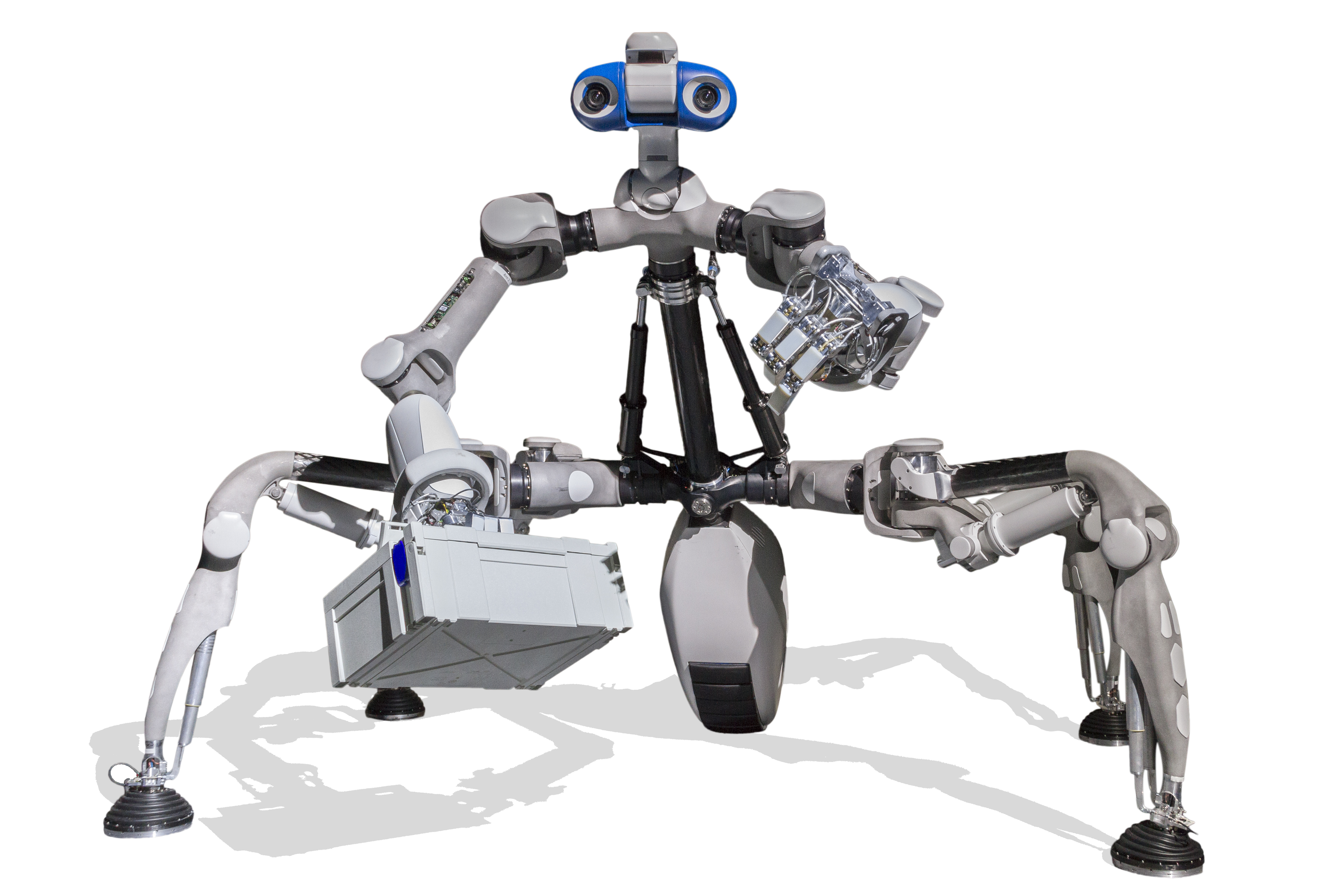
MANTIS ist ein mehrbeiniger Roboter mit sechs Extremitäten, der als Plattform zur Forschung im interdisziplinären Gebiet der mobilen Manipulation von Laufrobotern entwickelt wurde. Das System nutzt zwei unterschiedliche Grundhaltungen um verschiedene Aufgaben zu lösen: eine Manipulationshaltung, in der die vorderen zwei Extremitäten für die Manipulation und die hinteren vier Extremitäten für die Lokomotion genutzt werden sowie eine Lokomotionshaltung, in der alle sechs Extremitäten für die Lokomotion genutzt werden. Durch die Vielseitigkeit des Systems können komplexe Szenarien und die Wechselwirkung von Software-Komponenten bei der Durchführung untersucht werden.
MANTIS ist als autonomes System konzipiert, das über eine eigene Stromversorgung, einen Mini ITX Rechner und dem DFKI ZynqBrain als zentrale Steuerungseinheiten des Roboters sowie mehrere im System verteilte FPGA-Recheneinheiten und Mikrocontroller für die dezentrale Datenvorverarbeitung und Regelung von Subsystemen verfügt. Für die Wahrnehmung der Umwelt ist das System mit Drucksensoren in den Fußsohlen, taktilen Sensorfeldern in den Greifflächen, einem Stereokamerasystem, einem Laserscanner und inertialen Messeinheiten in Kopf und Abdomen ausgestattet. Für die Überwachung der internen Zustände können vom System Strom-, Spannungs-, Temperatur-, Beschleunigungs-, Positions-, Kraft- und Drehmomentsensoren ausgewertet werden.
Der Roboter MANTIS wird im Rahmen des Vorhabens LIMES entwickelt, dessen Ziel die Generierung und Optimierung verschiedener Lokomotionsverhalten für unterschiedliche Situationen ist. Die maschinell erlernten Verhalten werden nach der Entwicklung und dem Test in der Simulationsumgebung MARS auf dem realen System evaluiert. Die erlernten Lokomotionsverhalten sollen auch auf dem realen System abhängig von der Umgebung und dem Untergrund ausgewählt und angepasst werden.
In dem Vorhaben BesMan wird das System für die Erforschung von Verhalten zur zwei-Arm-Manipulation verwendet, welche durch die Verwendung von neuartigen Methoden des Imitationslernens generiert wurden.
Im Rahmen des Vorhabens D-Rock wird MANTIS als Referenzsystem genutzt, um die modelbasierte Softwareentwicklung an einem komplexen System zu demonstrieren. Zur Demonstration der Effektivität dieses Entwicklungsansatzes wird zum Abschluss eine Aufgabe der DARPA Robotic Challenge mit dem System absolviert.
Videos
Digitaltag 2021: Robotische Systeme im All – Laufroboter Mantis und Rover SherpaTT
Robotische Systeme im All – Laufroboter Mantis und Rover SherpaTT.
Wiebke Brinkmann und Tobias Stark, Forschungsbereich Robotics Innovation Center, live aus der Weltraum Explorationshalle, Aufzeichnung vom 18.06.2021, 11:30 – 12:00 Uhr
Intelligente Weltraum-Robotik: DFKI-Wissenschaftlerin Wiebke Brinkmann über die Forschung in Bremen
PRO-ACT: Multi-Roboter-Kooperation im Weltraum
Die Multi-Robotik-Kooperation ist eine von mehreren Schlüsseltechnologien, die für die Erforschung des Planeten als vielversprechend angesehen werden. Im Rahmen des PRO-ACT-Projekts wurden diese Technologien angewandt und weiterentwickelt. Die beteiligten Robotersysteme VELES (ein sechsrädriger Rover von PIAP Space, Polen), Mantis (ein sechsbeiniges Laufrobotersystem von DFKI, Deutschland) und die Mobile Gantry (eine vierrädrige Gantry mit einem 3D-Drucker von AVS, Spanien) waren für die gemeinsame Durchführung von Aufgaben vorgesehen. In den letzten Monaten des Projekts verschlechterte sich die Situation aufgrund der Corona-Pandemie, und infolgedessen nahmen auch die Reisebeschränkungen zu, so dass die gemeinsamen Tests mit den Robotersystemen nicht wie geplant durchgeführt werden konnten. Das Video gibt einen Einblick, wie die kooperativen Aufgaben dennoch getestet werden konnten, um das Projekt erfolgreich abzuschließen.
Weitere Videos zeigen die durchgeführten Abschlusstests im technischen Detail.
MANTIS: Mehrgliedriger Laufroboter für mobile Manipulation in unstrukturierten Umgebungen
Der Roboter Mantis beim Laufen mit verschiedenen Gangarten und Überwinden von Hindernissen sowie Durchführen unterschiedlicher Manipulationsaufgaben.