
The Critical Design Review (CDR) provides the opportunity to assess the project development prepared by the consortium within the five key concepts:
- A functional assembled mirror, with independently adjustable tiles
- Standard interfaces to latch structure elements and provide power and data networks
- Precision assembly
- Adaptable perception and localisation
- Extended mobility
Three demonstrators are being reviewed by the European Commission and the PSA (Programme Support Activity):
Firstly, the dISAS demonstrator addresses two main objectives, to provide:
- a set of tools for the specification, execution and visualisation of large structures assembly via simulation, in order to validate their feasibility
- a concrete application with the on-orbit assembly of a telescope’s primary mirror
Magellium (Ramonville-St-Agne, FR) is developing the core simulation functionality, and uses the simulator operationally to validate the design of the demonstrator and also to ensure fidelity with respect to a real spacecraft mission.
French laboratory ONERA (Toulouse, FR) has responsibility for creating and optimising the complex tools that are required to synthesise a realistic spacecraft attitude controller, which stabilises the spacecraft during assembly operations.
Secondly, dPAMT, a demonstrator of high-precision assembly of Segmented Mirror Tiles (SMT), has designed the way for the tiles to interconnect.
For this demonstrator, DLR (Weßling, DE) is leader in system engineering, with CSEM (Neuchâtel, CH) for the robotic mechatronics and Space Application Services (Brussels, BE) for the standard HOTDOCK interfaces between the Segmented Mirror Tiles.
The goal of the dPAMT is to demonstrate the high precision robotic assembly of SMTs. It also aims to validate the final assembly accuracy. Additionally, it will serve as a demonstrator of the functionality of SMTs mirror adjustment system. It will demonstrate Key Concepts 1, 2, 3 and 4.
Furthermore, aspects of Key Concept 5 (Extended mobility) are demonstrated by using a mobile robotic base (only considering the mobility to extend the workspace of the manipulator during the assembly, but not to investigate dynamical effects of the overall spacecraft in micro-gravity, which will be covered by the dISAS demonstrator).
The main objectives of the demonstrator are to:
- prove the feasibility of performing an autonomous assembly of mirror tiles for a segmented telescope using the standard connection interfaces (HOTDOCK) and a suitable robotic manipulator.
- verify the assembly of mirror tiles using an external measurement device, and command suitable motions of the optical surfaces in the SMTs to correct the alignment errors induced by the assembly process.
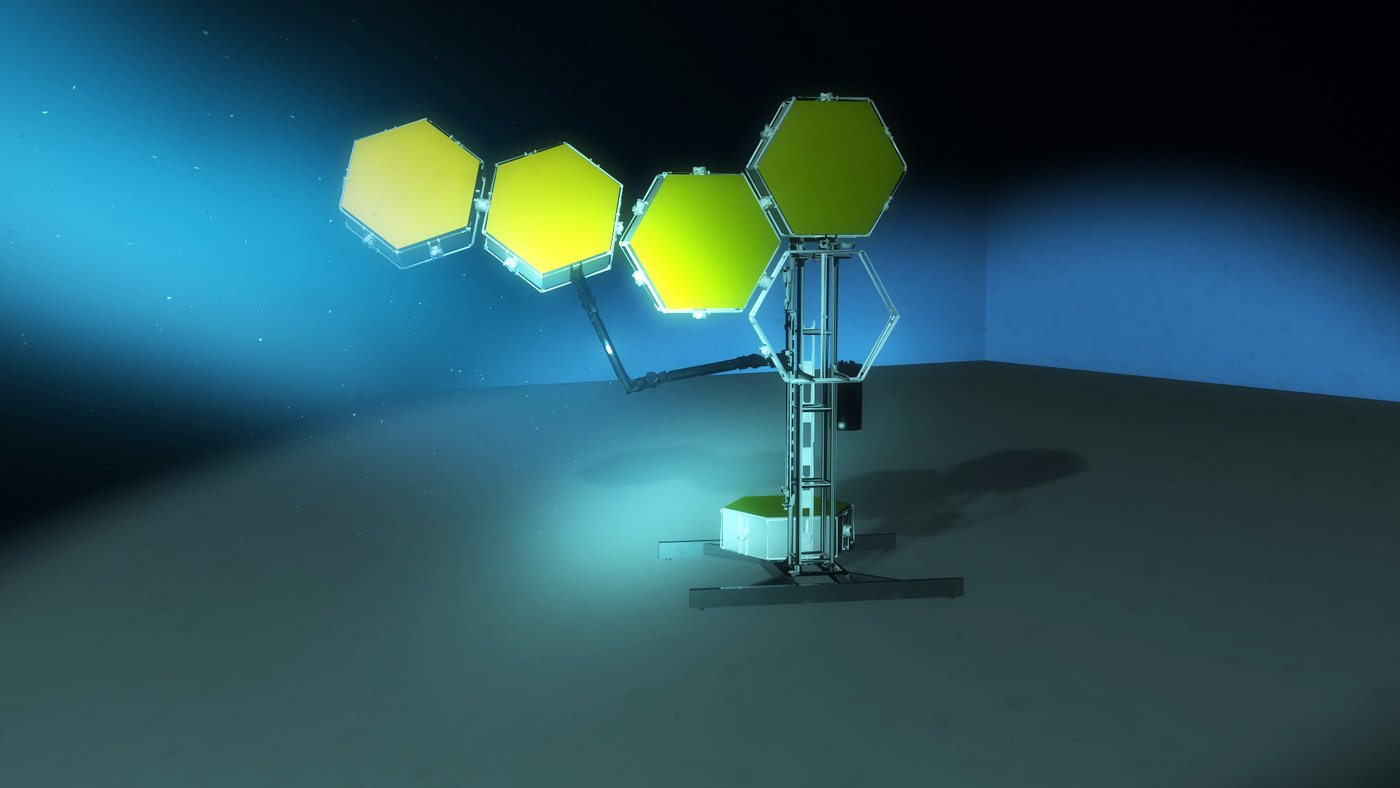
Thirdly, dLSAFFE a demonstrator of large structure assembly in a free-floating environment is tested in a 3,400 m3 salt water basin at the German Research Centre for Artificial Intelligence (DFKI) in Bremen, Germany.
This zero-buoyancy facility environment eases weight restrictions of manipulated objects and thus allows the assembly and interaction with large structures. In the context of PULSAR, dLSAFFE will be used to demonstrate the assembly of the telescope mirror on a large scale, representing the robotic system and the mirror tiles at a scale ratio of nearly 1:1. dLSAFFE demonstrates both the Key Concepts 4 (Adaptable perception and localisation) and 5 (Extended mobility). Extended mobility enables the system to build a very large structure with a minimum length robot arm, which means the limited working space of the manipulator is being overcome by building part of the structure right at the station, which is then turned and moved upward as a package.
DFKI, with its knowledge of underwater and space robotics applications takes overall responsibility for this demonstrator, while Graal Tech (Genova, IT) put into play their underwater engineering support.
The H2020 PULSAR Consortium
The consortium is composed of Magellium (Ramonville-St-Agne, FR), Graal Tech SRL, The Swiss Center for Electronics and Microtechnology (CSEM), German Aerospace Centre (DLR), German Research Center for Artificial Intelligence (DFKI), Space Application Services, ONERA and Thales Alenia Space.
For all information, contact:
Consortium Project Manager
Thierry Germa
Phone +33 562 247 753
therry.germa[at]magellium.fr
EU Research Programme Officer
Christos Ampatzis
Phone +32 2 29 69723
christos.ampatzis@ec.europa.eu
Images are available at www.h2020-pulsar.eu and via Twitter @H2020-PULSAR
PULSAR (OG 8) is part of the EU’s Strategic Research Cluster “Space Robotics Technologies”.
This project has received funding from the European Union’s Horizon 2020 research and innovation programme under grant agreement No. 821858