SherpaUW

Technical Details
| Size: | The system has variable dimensions; smallest footprint: 1m x 1m, biggest footprint: 2.4m x 2.4m. Height ranges from 0.8m to 1.8m |
| Weight: | Approx 200kg |
| Power supply: |
LiPo primary battery: 44,4 V; 10 Ah LiPosecondary battery: 44,4 V; 10 Ah (autonomous hot switching) Alternatively: External AC/DC Power Supply
|
| Speed: | 0.7 m/s (max), 0.1 m/s (nominal) |
| Actuation/ Engine: |
4-wheel drive with active ground adaption,
alternatively short traverses of walking motion
|
| Sensors: |
- Force-Torque sensor FT-DELTA 160 at each wheel
- Inertial Measurement Unit KVH 1750
- USBL Evologics S2CR 48/78
- Camera Basler ACE
- LED lamps Bowtech
- Obstacle Avoidance Sonar Tritech Micron DST
- DVL Rowe SeaPilot
- Distributed Magnetometer Array
- Laser line projector
|
| Communication: |
Gigabit Ethernet (with umbilical), up to 31.2 kbit/s (acoustic without umbilical)
|
| On-Board Computer: |
IntelCore i7-4785T, 2,2GHz
|
| Structure and Mechanisms: |
- 6 DoF Manipulator
- 4x 5DoF Suspension Units
|
Organisational Details |
|
| Sponsor: |
German Aerospace Center e.V.
Federal Ministry for Economic Affairs and Climate Action |
| Grant number: | Funded by the German Space Agency (DLR Agentur) with federal funds of the Federal Ministry of Economics and Technology in accordance with the parliamentary resolution of the German Parliament. Grant no. 50 RA 1301. |
| Application Field: | Underwater Robotics |
| Related Robots: |
SherpaTT
Expandable Rover for Planetary Applications
Leng
Exploration AUV for long-distance-missions
DAGON
|


System description

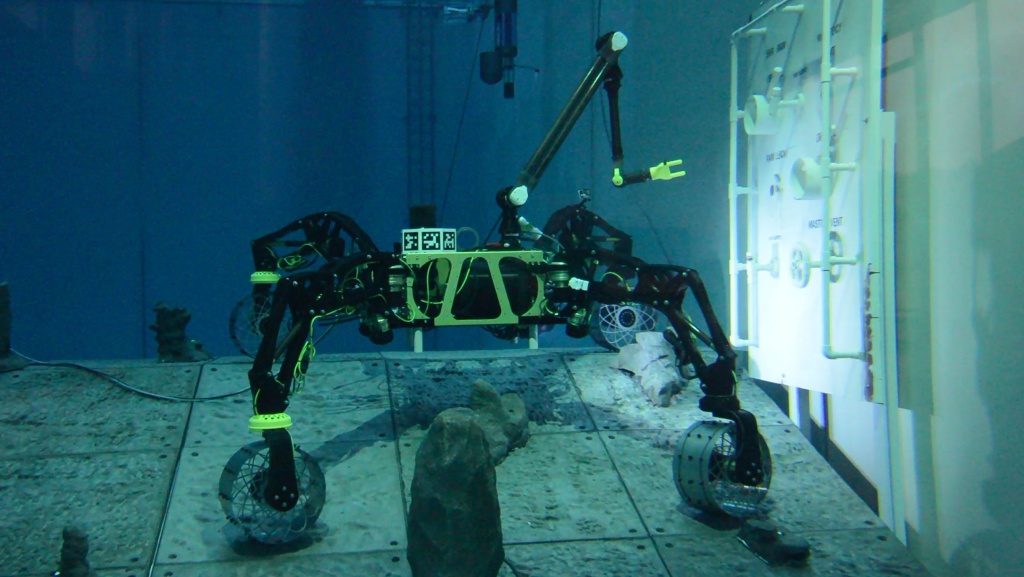
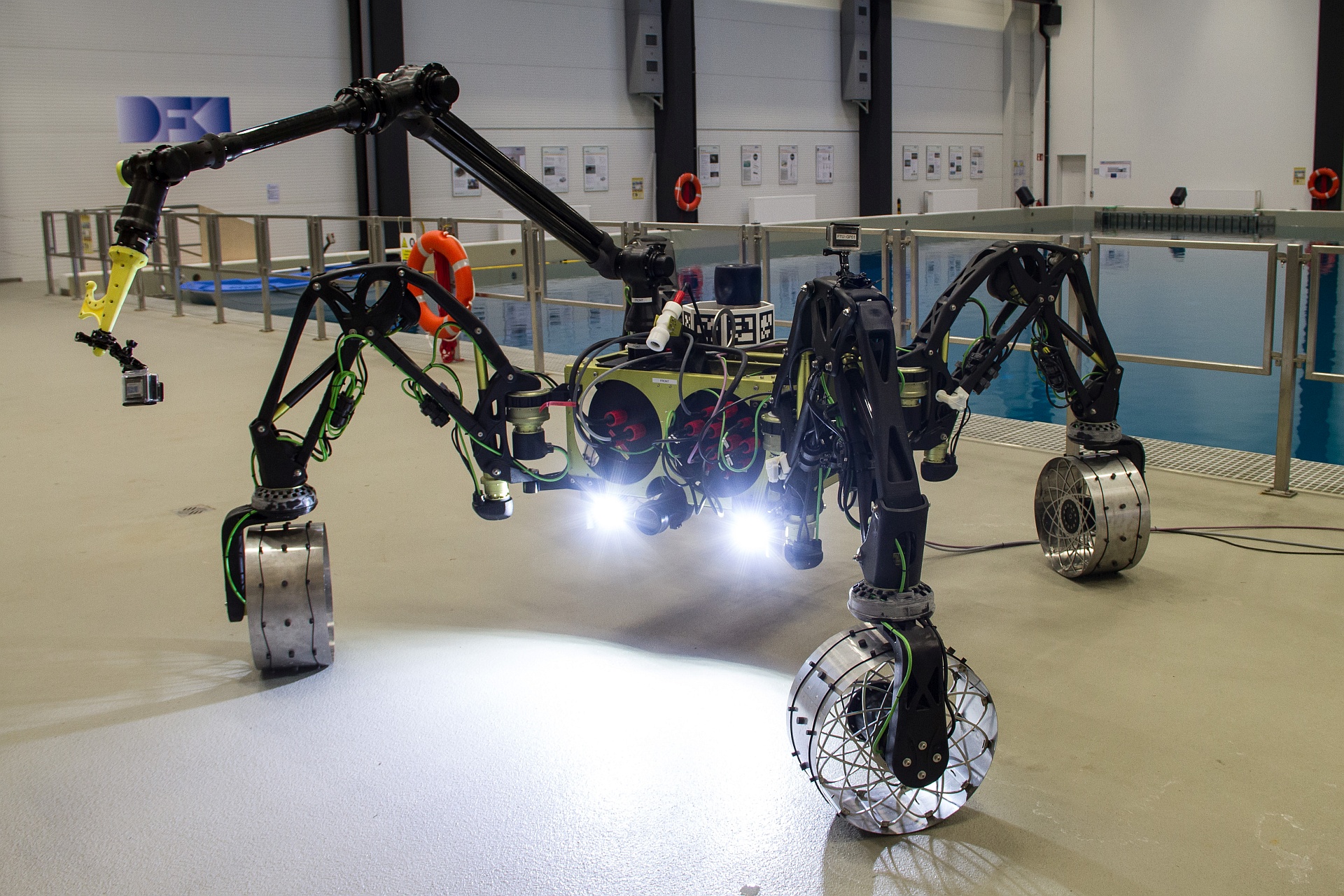
SherpaUW is a hybrid walking and driving exploration rover for subsea applications. The locomotive system consists of four legs with 5 active DoF each. Additionally, a 6 DoF manipulation arm is available. All joints of the legs and the manipulation arm are sealed against water. The arm is pressure compensated, allowing the deployment in deep sea applications.
The actuators are rated for depths up to 100m without oil filling, while 6.000m are rated for pressure compensated actuators.
Possible areas of application include surveillance and maintenance for underwater infrastructures, exploration and resource utilization and research on maritime deep sea life. The rover can be deployed as a single system or as part of a maritime multi-robot system.
SherpaUW’s hybrid crawler-design is intended to allow for extended long-term missions on the sea floor. Since it requires no extra energy to maintain its posture and position compared to traditional underwater ROVs (Remotely Operated Vehicles), SherpaUW is well suited for repeated and precise sampling operations, for example monitoring black smockers over a longer period of time.
Videos
SherpaUW: Tests with hybrid underwater rover in the maritime exploration hall
