SherpaUW

Technische Details
| Größe: | Variabel, kleinster Fußabdruck: 1m x 1m, größer Fußabdruck 2,4m x 2,4m. Körperhöhe zwischen 0,8m und 1,8m |
| Gewicht: | Ca. 200kg |
| Stromversorgung: |
LiPo Primärbatterie: 44,4 V; 10 Ah LiPo Sekundärbatterie: 44,4 V; 10 Ah (autonomous hot switching) Alternativ: Externe Versorgung über Netzteil
|
| Geschwindigkeit: | 0,7 m/s (max), 0,1 m/s (nominal) |
| Antrieb/ Motoren: |
4-Rad Antrieb mit aktiver Bodenadaption,
alternativ kurze Strecken schreitend
|
| Sensoren: |
- Kraftmomentensensor FT-DELTA 160 an jedem Rad
- Intertialsensor KVH 1750
- USBL Evologics S2CR 48/78
- Kamera Basler ACE
- LED UW-Lampen Bowtech
- Hindernisvermeidungs-Sonar Tritech Micron DST
- DVL Rowe Seapilot
- Verteiltes Magnetometer-Sensor-Array
- Laserlinien-Projektor
|
| Kommunikation: |
Gigabit Ethernet (mit angeschlossenem Versorgungskabel), ansonsten bis zu 31.2 kbit/s via akustischem Modem
|
| On-Board Computer: |
IntelCore i7-4785T, 2,2GHz
|
| Struktur und Mechanismen: |
- 6 DoF Manipulator
- 4x 5DoF Fahrwerkseinheiten
|
Organisatorische Details |
|
| Fördergeber: |
Deutsches Zentrum für Luft- und Raumfahrt e.V.
Bundesministerium für Wirtschaft und Klimaschutz |
| Förderkennzeichen: | Gefördert von der Raumfahrt-Agentur des Deutschen Zentrums für Luft- und Raumfahrt e.V. mit Mitteln des Bundesministeriums für Wirtschaft und Klimaschutz aufgrund eines Beschlusses des Deutschen Bundestages. Förderkennzeichen 50 RA 1301. |
| Anwendungsfelder: | Unterwasserrobotik |
| Verwandte Projekte: |
TransTerrA
Semi-autonomous cooperative exploration of planetary surfaces including the installation of a logistic chain as well as consideration of the terrestrial applicability of individual aspects
(05.2013- 12.2017)
REMARO
Reliable AI for Marine Robotics
(12.2020- 11.2024)
REMARO
Reliable AI for Marine Robotics
(12.2020- 11.2024)
TransTerrA
Semi-autonome kooperative Exploration planetarer Oberflächen mit Errichtung einer logistischen Kette sowie Betrachtung terrestrischer Anwendbarkeit einzelner Aspekte
(05.2013- 12.2017)
|
| Verwandte Robotersysteme: |
SherpaTT
Expandable Rover for Planetary Applications
Leng
Explorations-AUV für Langstreckenmissionen
DAGON
|


Systembeschreibung

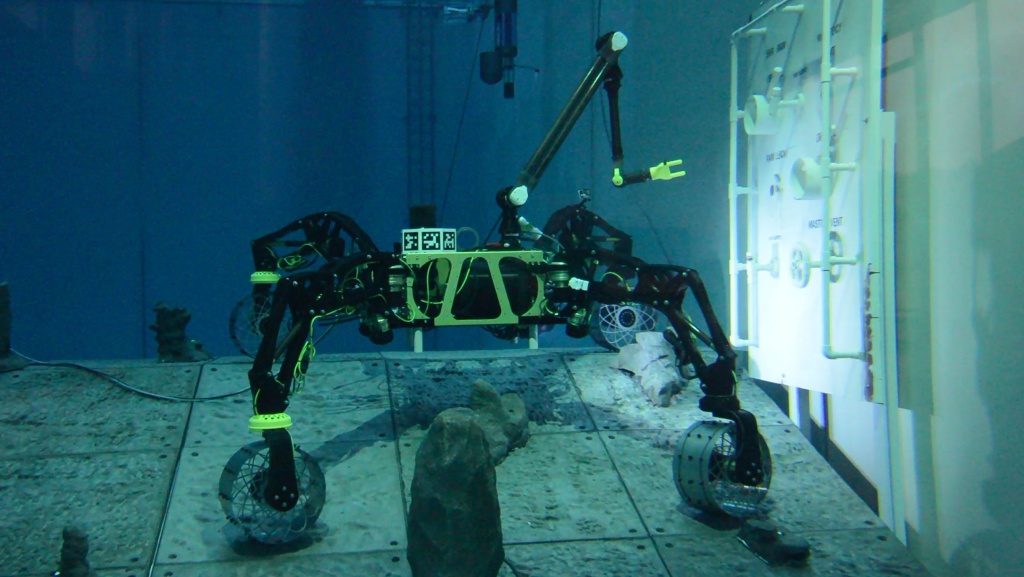
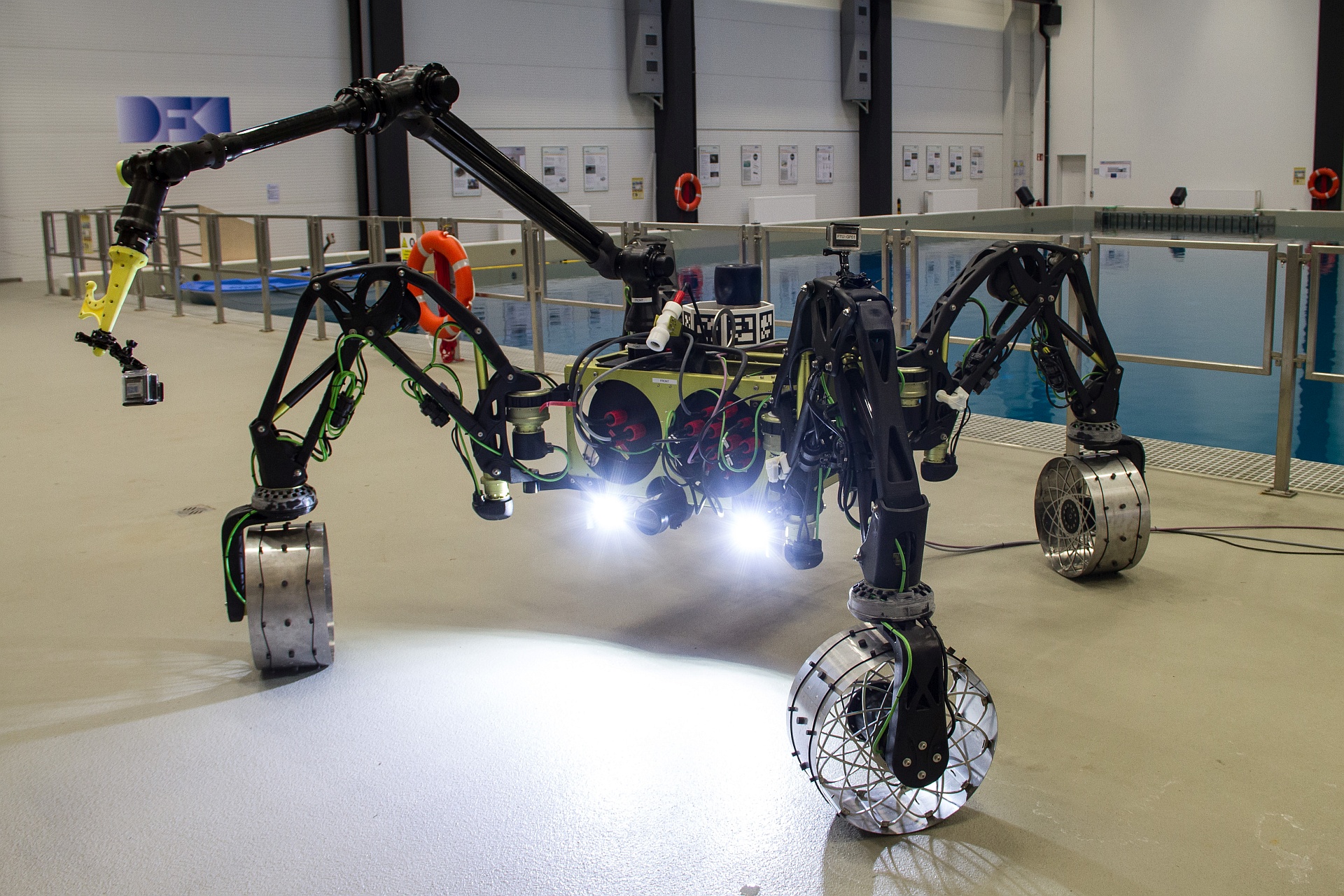
SherpaUW ist ein hybrider Rover mit der Fähigkeit rädriger Fortbewegung und der Möglichkeit, sich laufend fortzubewegen. Das Lokomotionssystem besteht aus vier Beinen, jeweils mit einem Rad anstelle eines Fußes bestückt. Insgesamt hat jedes der Beine 5 aktive Freiheiten (DoF, Degrees of Freedom), der zentral montierte Arm zusätzliche 6 DoF.
Alle Gelenke der Beine und des Armes sind wasserdicht ausgeführt. Der Arm ist ölgefüllt und damit druckkompensiert, was den Einsatz in großen Tiefen erlaubt.
Alle Gelenke sind für Tiefen bis 100m ohne Ölbefüllung ausgelegt, mit Ölbefüllung sind Tiefen bis zu 6.000m möglich.
Mögliche Einsatzgebiete des Systems beinhalten die Überwachung und Wartung von Unterwasser-Infrastruktur, zum Beispiel an Offshore-Windanlagen. Weiterhin ist der Einsatz bei der Prospektion von Tiefseeressourcen oder dem Erforschen von Leben in der Tiefsee denkbar. Der Einsatz kann als individuelles Einzelsystem oder im Verbund mit mehreren Robotern als Team erfolgen.
Das hybride Rad-Laufsystem erlaubt auch Langzeitmissionen auf dem Meeresboden. Durch das Beibehalten einer Pose ohne zusätzlichen Energieaufwand werden beispielsweise präzise und wiederholte Messungen möglich, die mit traditionellen Unterwasser ROVs (Remotely Operated Vehicles) nicht möglich wären.
Videos
SherpaUW: Tests mit hybridem Unterwasser-Rover in der Maritimen Explorationshalle
