iMRK
iMRK Dual-Arm Robot (Photo: Annemarie Popp, DFKI GmbH)
 Foto: Annemarie Popp, DFKI GmbH
Foto: Annemarie Popp, DFKI GmbH
Contact person:
Technical Details
System description
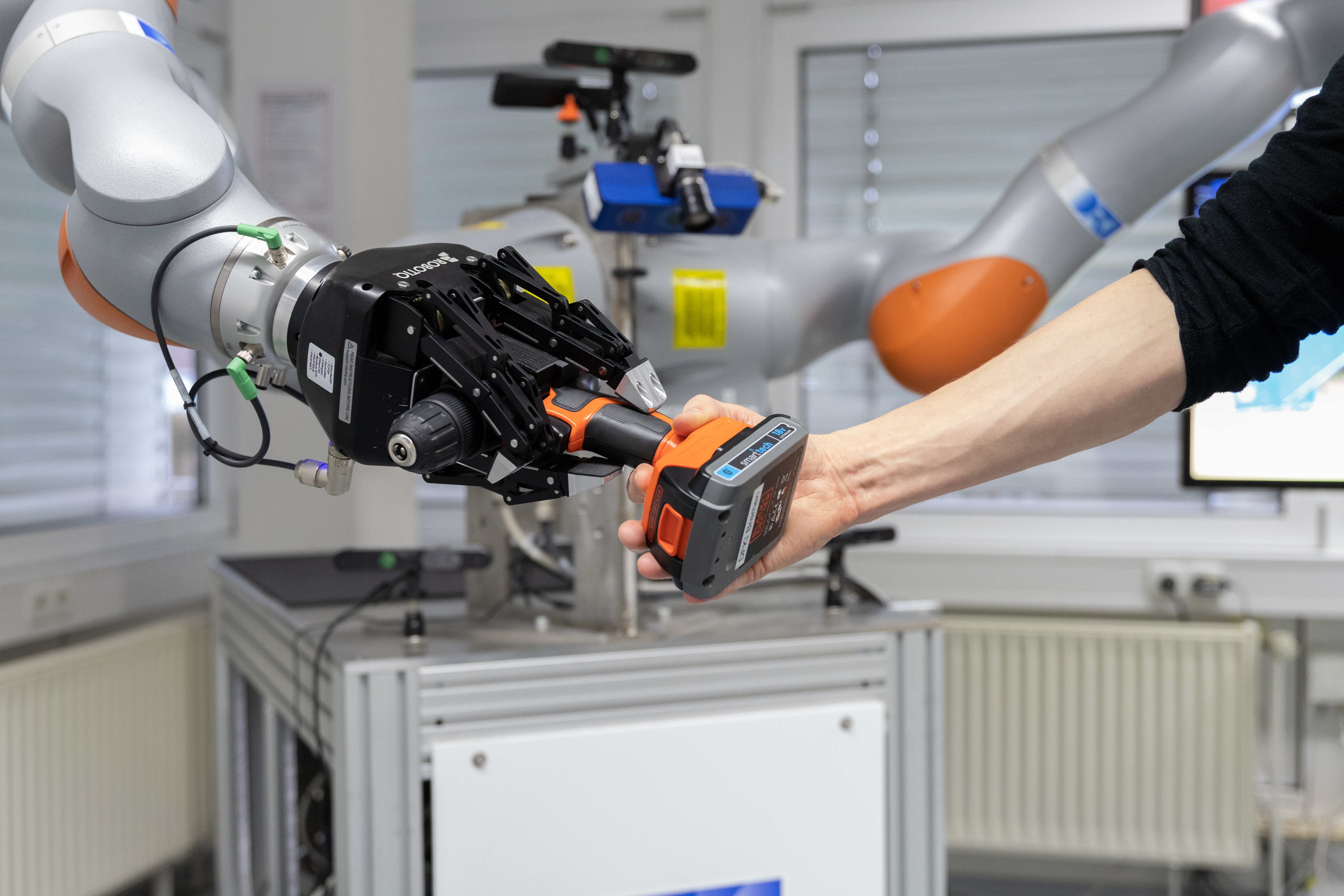 Foto: Annemarie Popp, DFKI GmbH
Foto: Annemarie Popp, DFKI GmbH
The iMRK system is an industrial dual-arm lightweight robot for research in human-robot collaboration and safe coexistence in manufacturing scenarios. It consists of two industrial KUKA LBR iiwa lightweight manipulators with 7 degrees of freedom, each. Each arm has a payload of 14 kg, and a maximum reach of 820 mm. The arms have proprietary stabilizing impedance controllers in joint and Cartesian space with programmable damping and stiffness. They allow robust positioning and safe environment interaction. The arms are equipped with Robotiq 3-finger grippers, which have a weight of 2.3 kg and a payload of 2.5 kg (pinch grasp) to 10 kg (enclosing grasp). Including the grippers, the system has 22 active degrees of freedom in total. While the arms are currently arranged in a way that dual-arm manipulation is facilitated, they can be placed freely on the table structure.
On sensor side, the system is equipped with 4 ASUS Xtion RGB-D cameras that allow detection of obstacles in the environment of the robot and facilitate safe human-robot coexistence. The cameras are positioned in a way that the manipulation area in front of the arms and the area on the table behind the robot is well covered. Furthermore, two SICK laser scanners are placed on opposite corners of the table. They provide a 360° coverage of the environment and are used for workspace monitoring. Finally, an Ensenso RGB-D camera provides high resolution images of the manipulation area. The camera is used in object detection for manipulation.
From computational point of view, the system is equipped with two industrial PCs, one is dedicated to robot control, the other is used solely for sensor processing. The control PC is connected to the proprietary KUKA robot controllers and allows coordinated real-time control of both arms.
On software side, the system is controlled using the Rock robotics framework. A whole-body controller coordinates different robot behaviors like Cartesian position control, force control, obstacle avoidance and dual-arm manipulation.
On sensor side, the system is equipped with 4 ASUS Xtion RGB-D cameras that allow detection of obstacles in the environment of the robot and facilitate safe human-robot coexistence. The cameras are positioned in a way that the manipulation area in front of the arms and the area on the table behind the robot is well covered. Furthermore, two SICK laser scanners are placed on opposite corners of the table. They provide a 360° coverage of the environment and are used for workspace monitoring. Finally, an Ensenso RGB-D camera provides high resolution images of the manipulation area. The camera is used in object detection for manipulation.
From computational point of view, the system is equipped with two industrial PCs, one is dedicated to robot control, the other is used solely for sensor processing. The control PC is connected to the proprietary KUKA robot controllers and allows coordinated real-time control of both arms.
On software side, the system is controlled using the Rock robotics framework. A whole-body controller coordinates different robot behaviors like Cartesian position control, force control, obstacle avoidance and dual-arm manipulation.
Videos
HARTU: UC2b - Assembly automotive demo

By playing the video, you accept YouTube's privacy policy.
Demonstration of robotics solutions developed in the HARTU project for automotive manufacturing. Through kinesthetic teaching and gestures, the robot learns new tasks, adapts to product variants, and reproduces movements adaptively and force-sensitively.