iMRK
Intelligenter Zweiarm-Manipulator zur Mensch-Roboter Kollaboration

Ansprechpartner/in:
Technische Details
Systembeschreibung
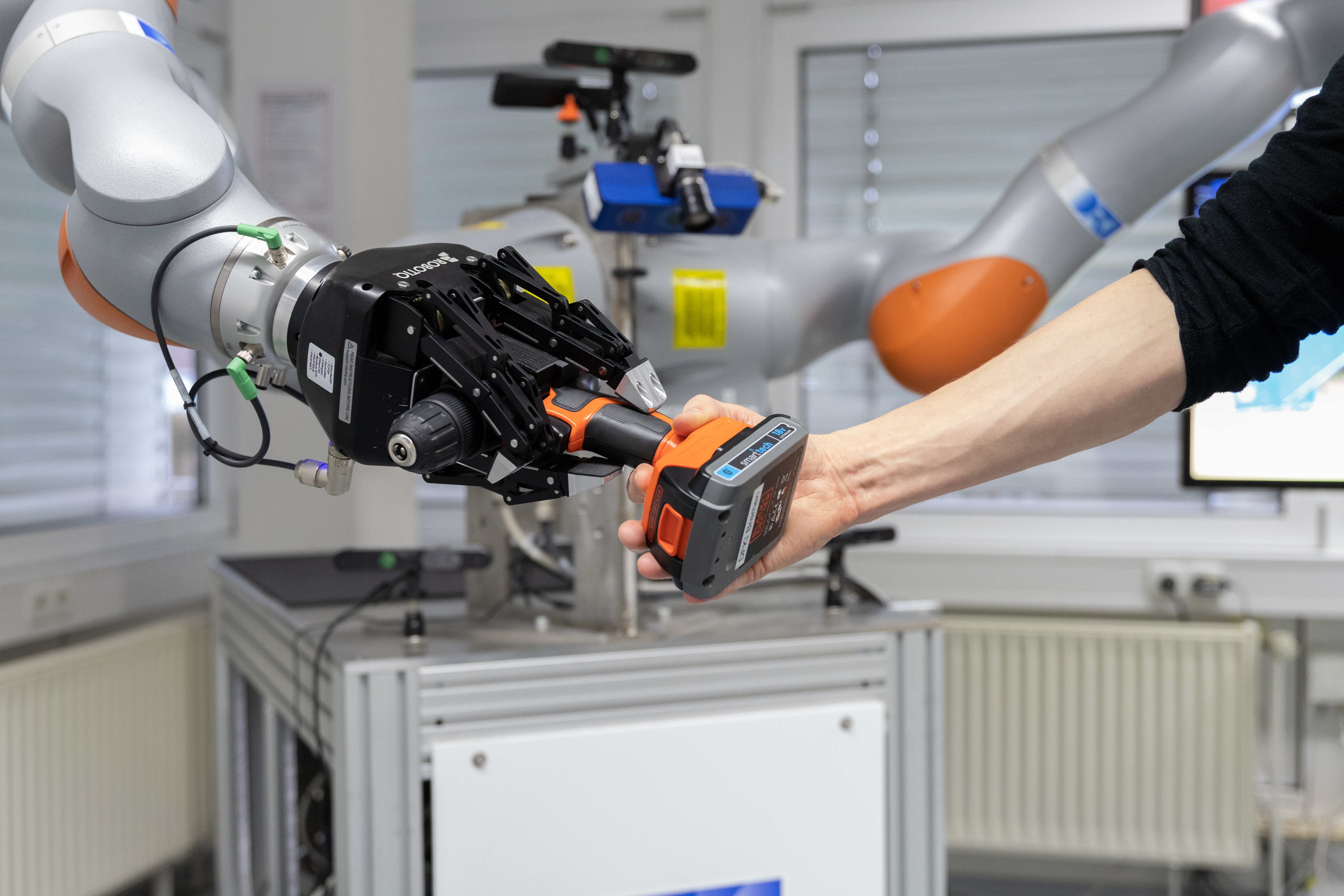
Das iMRK-System ist ein industrieller zweiarmiger Leichtbauroboter für die Erforschung der Mensch-Roboter-Kollaboration und der sicheren Koexistenz in Fertigungsszenarien. Er besteht aus zwei industriellen KUKA LBR iiwa Leichtbau-Manipulatoren mit jeweils 7 Freiheitsgraden. Jeder Arm hat eine Traglast von 14 kg und eine maximale Reichweite von 820 mm. Die Arme werden von proprietären stabilisierenden Impedanzreglern im Gelenk- und kartesischen Raum mit programmierbarer Dämpfung und Steifigkeit gesteuert. Sie ermöglichen eine robuste Positionierung und eine sichere Interaktion mit der Umgebung. Die Arme sind mit Robotiq-3-Finger-Greifern ausgestattet, die ein Gewicht von 2,3 kg und eine Nutzlast von 2,5 kg (Pinzettengriff) bis 10 kg (umschließender Griff) haben. Einschließlich der Greifer verfügt das System über insgesamt 22 aktive Freiheitsgrade. Die Arme sind derzeit so angeordnet, dass eine beidarmige Manipulation möglich ist, sie können aber frei auf der Tischstruktur platziert werden.
In Bezug auf die Sensorik ist das System mit 4 ASUS Xtion RGB-D-Kameras ausgestattet, die eine Erkennung von Hindernissen in der Umgebung des Roboters ermöglichen und eine sichere Mensch-Roboter-Koexistenz erleichtern. Die Kameras sind so positioniert, dass der Manipulationsbereich vor den Armen und der Bereich auf dem Tisch hinter dem Roboter gut abgedeckt ist. Außerdem sind zwei SICK-Laserscanner an gegenüberliegenden Ecken des Tisches angebracht. Sie bieten eine 360°-Abdeckung der Umgebung und werden zur Überwachung des Arbeitsbereichs eingesetzt. Schließlich liefert eine Ensenso RGB-D-Kamera hochauflösende Bilder des Manipulationsbereichs. Die Kamera wird zur Objekterkennung für die Manipulation verwendet.
Aus rechentechnischer Sicht ist das System mit zwei Industrie-PCs ausgestattet, von denen einer für die Robotersteuerung und der andere ausschließlich für die Sensorverarbeitung verwendet wird. Der Steuerungs-PC ist mit den proprietären KUKA-Robotersteuerungen verbunden und ermöglicht die koordinierte Echtzeitsteuerung beider Arme.
Softwareseitig wird das System mit dem Rock Robotik Framework gesteuert. Ein Whole-Body Controller koordiniert verschiedene Verhaltensweisen des Roboters wie kartesische Positionsregelung, Kraftregelung, Hindernisvermeidung und Dual-Arm Manipulation.
In Bezug auf die Sensorik ist das System mit 4 ASUS Xtion RGB-D-Kameras ausgestattet, die eine Erkennung von Hindernissen in der Umgebung des Roboters ermöglichen und eine sichere Mensch-Roboter-Koexistenz erleichtern. Die Kameras sind so positioniert, dass der Manipulationsbereich vor den Armen und der Bereich auf dem Tisch hinter dem Roboter gut abgedeckt ist. Außerdem sind zwei SICK-Laserscanner an gegenüberliegenden Ecken des Tisches angebracht. Sie bieten eine 360°-Abdeckung der Umgebung und werden zur Überwachung des Arbeitsbereichs eingesetzt. Schließlich liefert eine Ensenso RGB-D-Kamera hochauflösende Bilder des Manipulationsbereichs. Die Kamera wird zur Objekterkennung für die Manipulation verwendet.
Aus rechentechnischer Sicht ist das System mit zwei Industrie-PCs ausgestattet, von denen einer für die Robotersteuerung und der andere ausschließlich für die Sensorverarbeitung verwendet wird. Der Steuerungs-PC ist mit den proprietären KUKA-Robotersteuerungen verbunden und ermöglicht die koordinierte Echtzeitsteuerung beider Arme.
Softwareseitig wird das System mit dem Rock Robotik Framework gesteuert. Ein Whole-Body Controller koordiniert verschiedene Verhaltensweisen des Roboters wie kartesische Positionsregelung, Kraftregelung, Hindernisvermeidung und Dual-Arm Manipulation.