AUVx
A miniaturized autonomous underwater vehicle
 Foto: Annemarie Popp, DFKI
Foto: Annemarie Popp, DFKI
Filedownloads
System Flyer AUVx ENSystem Flyer AUVx DE
Project Flyer DAEDALUS EN
Project Flyer DAEDALUS DE
Technical Details
| Size: | 393 x 188 x 200 mm³ |
| Weight: | 2.120g |
| Power supply: |
9 NiMH Eneloop rechargeable batteries; 11,2 V / 2,3 Ah
|
| Speed: | 0.5m/s |
| Actuation/ Engine: |
3 in-house developed thrusters, each turnable by +/- 180°. Thrust is generated by Maxon DC motors with integrated gears and encoders. Noteworthy is the magnetic coupling which prohibits water running into the motor housing.
|
| Sensors: |
IMU: Analog Devices ADXL345 acceleration sensor, Honeywell HMC5883L magnetometer, Invensense ITG3200 gyroscope
Drucksensor: Freescale MPX5100DP, Sensitivität 45 mV/kPa, Messbereich von 0 bis 100 kPa (4,5 mV/cm)
Kamera: 8 MP Pi camera
Embedded motor encoder to determine angular speed
|
| Communication: |
Optical communication modem or copper wire cable.
|
| Computational Power: |
Custom FPGA Board, DAEDALUS BaseBoard with STM32 and Raspberry Pi Zero
|
| Maximum diving depth: |
10m
|
Organisational Details |
|
| Partner: | Fraunhofer IIS |
| Sponsor: |
Federal Ministry for Economic Affairs and Climate Action
German Aerospace Center e.V. |
| Grant number: | The project DAEDALUS is funded by the German Space Agency (DLR Agentur) with federal funds of the Federal Ministry of Economics and Technology in accordance with the parliamentary resolution of the German Parliament, grant no. 50NA1312 (DFKI). |
| Application Field: |
Underwater Robotics
Space Robotics |
| Related Projects: |
TRIPLE-nanoAUV 1
Localisation and perception of a miniaturized autonomous underwater vehicle for the exploration of subglacial lakes
(09.2020- 06.2023)
TRIPLE-MoDo
TRIPLE-Mobile Docking System: AI-based close-range navigation and control for soft-robotic-based docking systems
(11.2020- 05.2023)
DAEDALUS
Architectures and sensor data processing for energy-efficient control of self-powered tracking systems
(08.2013- 01.2017)
EurEx
Europa-Explorer
(12.2012- 04.2016)
|
| Related Robots: |
µAUV
|


System description
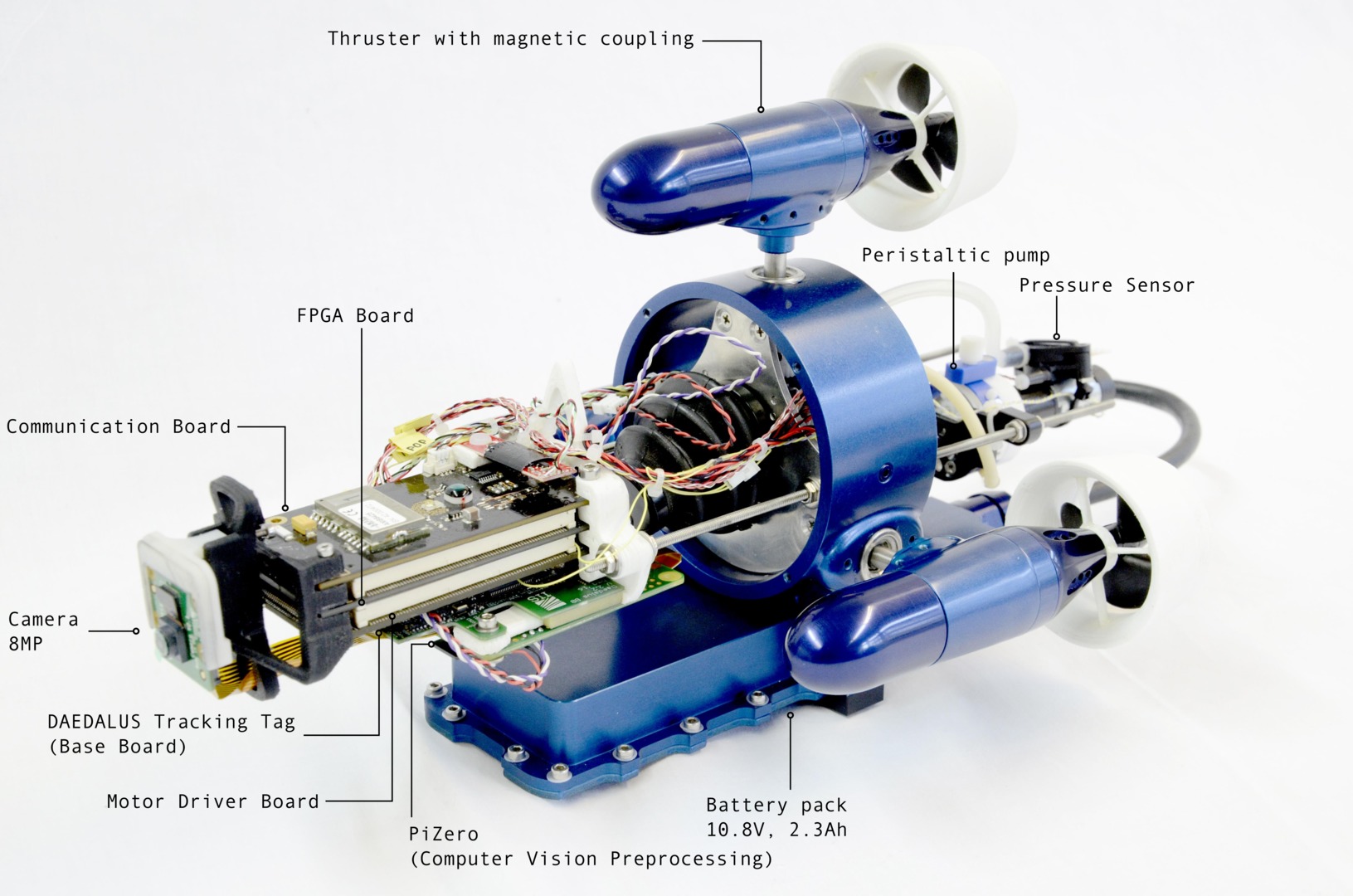 Foto: Hendrik Hanff, Annemarie Popp, DFKI
Foto: Hendrik Hanff, Annemarie Popp, DFKI
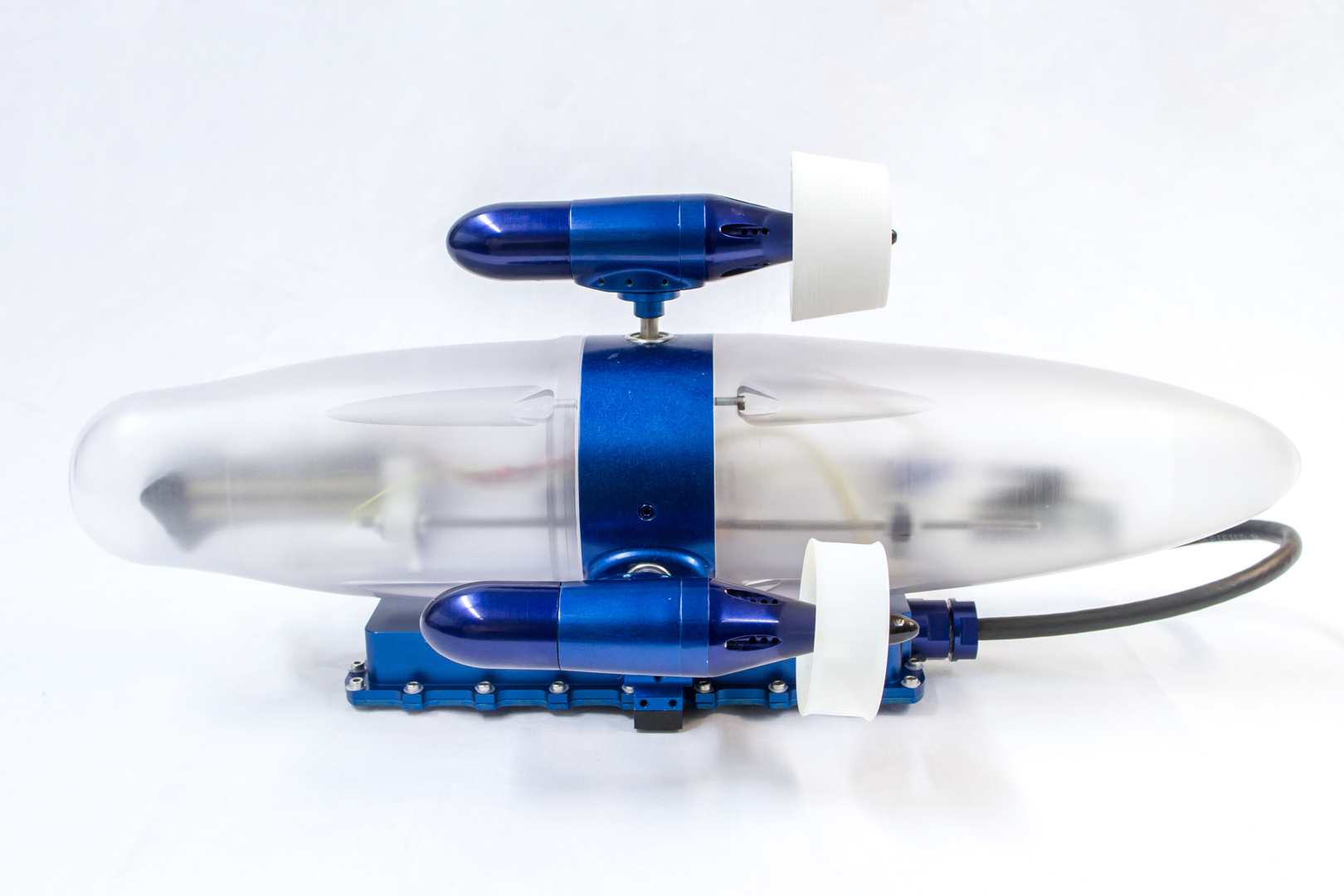 Foto: Annemarie Popp, DFKI
Foto: Annemarie Popp, DFKI
The autonomous underwater vehicle AUVX is designed as a miniaturized exploration and research vehicle. Its shape is particularly adapted to the requirements of the EurEx project: with its small diameter it fits into the underwater vehicle Leng. In the EurEx context, the AUVX must be able to locate the μGliders, which act as reference points, and subsequently return to the starting point. Furthermore it is supposed to do near field exploration. Therefore the vehicle is equipped with a variety of different sensors. In addition, a camera allows to use image recognition algorithms under water. These properties make the system perfectly fit for its tasks in the EurEx mission scenario. Furthermore, in the project DAEDALUS the AUVX serves as a demonstrator for using the DAEDALUS specific trackingtag in a robotic context. To maintain a high degree of energy efficiency while doing underwater locomotion, the hull was hydro-dynamically optimized. Another unique feature are the magnetically coupled thrusters which ensure that the electronics inside the thrusters is hermetically protected against the surrounding water. The AUVX can also be operated remotely as a hybrid ROV (Remotely Operated Vehicle) with an optical communication or copper wire cable.
Navigation is based on fusing data coming from the IMU, a mathematical model of the system and a tag detection which was implemented on the Raspberry Pi Zero using both OpenCV and ROS.
 and AUVx (right) side by side")


, µAUV² (centre) und dem AUVx (right) side by side")


. Flow velocity fields with white streamlines for vortex visualization are depicted. Colour indication: Red: High velocity magnitude; Blue: Low velocity")
 for visualization of vortical structures and grey streamlines for visualization of the wake velocity field.")


")
Fotogallery
[Translate to English:]