ARAMIES
Ambulating Robot for Autonomous Martian Investigation, Exploration and Science

The goal of the ARAMIES project is to develop and program a multifunctional, multi-degree of freedom, autonomous walking-robot for rough terrain. In particular, the project is focused on very steep and uneven terrain, e.g., canyon or crater walls.
| Duration: | 01.04.2004 till 30.04.2007 |
| Donee: | University of Bremen |
| Sponsor: |
German Aerospace Center e.V.
Federal Ministry of Economics and Technology ESA |
| Grant number: | Sponsored by the Space Agency of the German Aerospace Center with federal funds of the Federal Ministry of Economics and Technology in accordance with the parliamentary resolution of the German Parliament. DLR grant no. 50JR0561 ESA contract 18116/04/NL/PA |
| Application Field: | Space Robotics |
| Related Projects: |
SCORPION
An Eight-Legged Robot for Hazardous Outdoor-Terrain
(01.2001-
12.2005)
SpaceClimber
A Semi-Autonomous Free-Climbing Robot for the Exploration of Crater Walls and Bottoms
(09.2006-
09.2009)
|
| Related Robots: |
ARAMIES study
|


Project details


The ARAMIES project deals with developing a walking robot which is capable of autonomous operation in extremely difficult environments, especially very uneven and steep terrain, e.g., the slopes of Martian / Moon canyons or craters. These sites are of high scientific interest.
It is expected that in-situ measurements in the different layers of sediments give new insights for the exobiology and exogeology. Furthermore it is likely to find frozen water in craters near the pole.
For example, in February 2005 the HRSC on ESA's Mars Express obtained a picture during orbit 1343, which shows an impact crater located on the Vastitas Borealis plain which at the center contains residual water ice.
Because of their steepness and the rough rocky and sandy terrain, most craters can not be accessed with the standard wheeled rover technology.
Therefore, more mobility is necessary, which can be provided with the development of complex climbing robots.
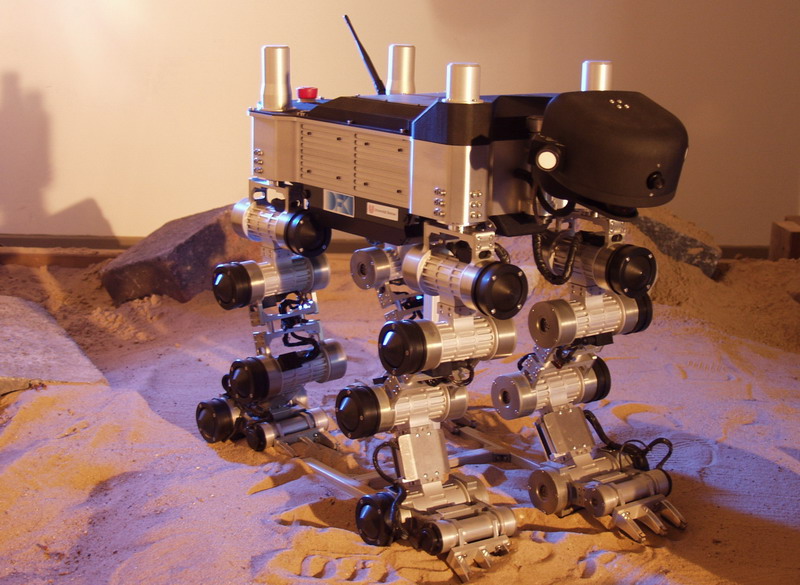
The ARAMIES robot comprises 26 active joints, 6 in each leg and 2 for actuating the head, which includes a camera, a laser scanner, and two ultrasound distance sensors.
In addition, the system has acceleration sensors and gyroscopes for stability control.
Furthermore, each joint is equipped with absolute position sensors, current sensors, and temperature sensors.
One major advantage of the ARAMIES robot in comparison to other walking robots is its actuated claw which is used to get hold in steep inclinations. In laboratory tests the system was able to climb up a rung wall with a inclination of 70°.
Each claw is equipped with five pressure sensors and an additional special IR-distance sensor which are used for robust ground contact detection.
The modular control and power hardware consists of a PC 104 system for high-level control (e.g. navigation & planning), a MPC 565/FPGA board for the reactive behavior-based control, and 5 FPGA controlled motor boards. Each of these motor boards can control and drive up to 6 motors and read in all analog sensors signals from the joints and the claw. Up to 8 motor boards can be connected to the MPC565/FPGA-board using LVDS-communication.
The software is based on bio-inspired locomotion control concepts. It features Central Pattern Generator (CPG) and reflex models. The bio-inspired mechanisms allow to solve the problem of controlling simultaneously 26 joints with high reactivity. In comparison to standard model-based robotic control approaches (e.g. control of an industrial manipulator), this is achieved by a very low number of arithmetic operations providing high energy efficiency.
Videos
ARAMIES: Climbing skills

ARAMIES owns 6 joints in each leg and two for the head equipped with cameras, laser scanner and ultrasound distance sensors.