ARAMIES

Technical Details
| Size: | 80 x 44 x 70 (LxBxH in cm) |
| Weight: | ~35 kg |
| Power supply: |
28,8V, 9Ah NiMh batteries
|
| Speed: | ~0,1 body length/sec = 8 cm/sec |
| Actuation/ Engine: |
4 (legs) x 6 (joints)+ 1 (head) x 2 (joints) = 26 motors
|
Organisational Details |
|
| Application Field: | Space Robotics |
| This system is not actively used anymore. | |
System description


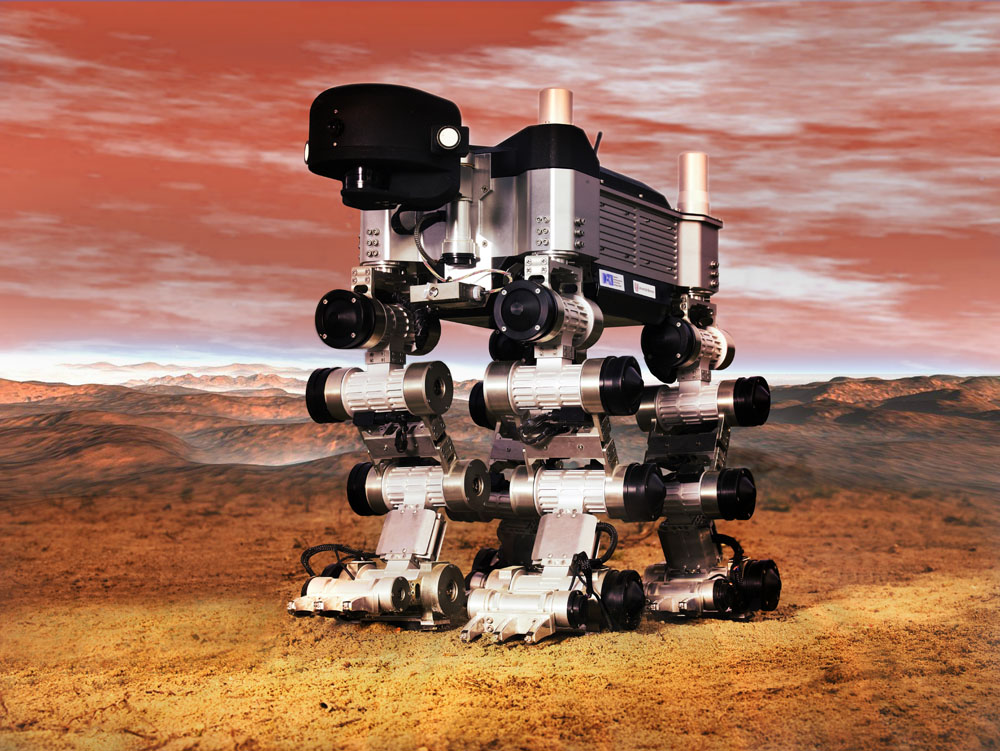
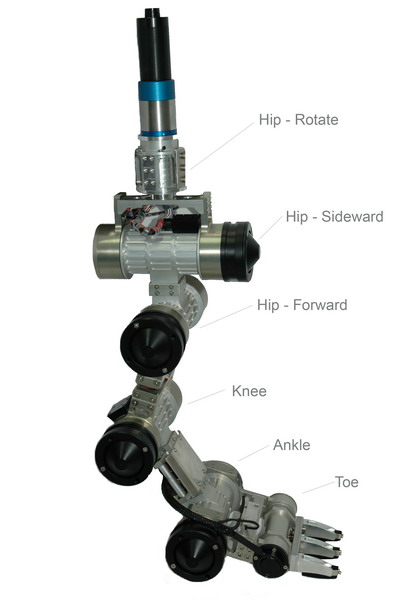
The ARAMIES robot comprises 26 active joints, 6 in each leg and 2 for actuating the head, which includes a camera, a laser scanner and two ultrasound distance sensors. In addition, the system has acceleration sensors and gyroscopes for stability control. Furthermore, each joint is equipped with absolute position sensors, current sensors, and temperature sensors.
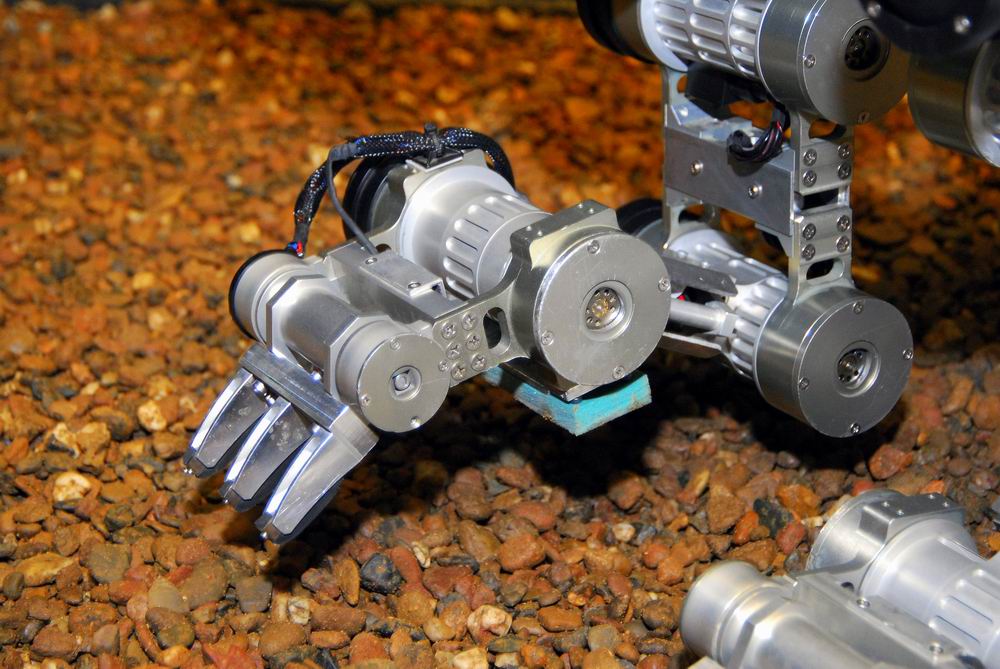
One major advantage of the ARAMIES robot in comparison to other walking robots is its actuated claw which is used to get a hold in steep inclinations. In laboratory tests the system was able to climb up a rung wall with a inclination of 70°. Each claw is equipped with five pressure sensors and an additional special IR-distance sensor which are used for robust ground contact detection.
The modular control and power hardware consists of a PC 104 system for high-level control (e.g. navigation & planning), a MPC 565/FPGA board for the reactive behavior-based control, and 5 FPGA controlled motor boards. Each of these motor boards can control and drive up to 6 motors and read in all analog sensors signals from the joints and the claw. Up to 8 motor boards can be connected to the MPC565/FPGA-board using LVDS-communication.
Videos
ARAMIES: Climbing skills

ARAMIES owns 6 joints in each leg and two for the head equipped with cameras, laser scanner and ultrasound distance sensors.