ARAMIES
Ein Laufroboter für autonome planetarische Erkundung

Das Ziel dieses Projektes ist der Entwurf, der Bau und die Programmierung eines Multifunktionsroboters mit hohen Freiheitsgraden, der in der Lage ist, autonome Operationen in einem extrem schwer zugänglichen Terrain durchzuführen. Insbesondere wird sehr raues und steiles Terrain, wie z.B. Canyon- oder Kraterabhänge betrachtet.
| Laufzeit: | 01.04.2004 bis 30.04.2007 |
| Zuwendungsempfänger: | Universität Bremen |
| Fördergeber: |
Deutsches Zentrum für Luft- und Raumfahrt e.V.
Bundesministerium für Wirtschaft und Technologie ESA |
| Förderkennzeichen: | Gefördert von der Raumfahrt-Agentur des Deutschen Zentrums für Luft- und Raumfahrt e.V. mit Mitteln des Bundesministeriums für Wirtschaft und Technologie aufgrund eines Beschlusses des Deutschen Bundestages. DLR Förderkennzeichen 50JR0561 ESA contract 18116/04/NL/PA |
| Anwendungsfelder: | Weltraumrobotik |
| Verwandte Projekte: |
SCORPION
Ein achtbeiniger Roboter für schwieriges Terrain
(01.2001-
12.2005)
SpaceClimber
Ein semi-autonomer freikletternder Roboter zur Untersuchung von Kraterwänden und -böden
(09.2006-
09.2009)
|
| Verwandte Robotersysteme: |
ARAMIES Integrationstudie
|


Projektdetails


Das ARAMIES-Projekt beschäftigt sich mit der Entwicklung eines Laufroboters, der in schwierigstem Gelände, vor allem in unebenen oder steilen Bereichen, autonom operieren kann. Einsatzbereiche sind z.B. Canyons und Krater auf dem Mond oder Mars, die von hohem wissenschaftlichen Interesse sind.
In-Situ-Messungen in den unterschiedlichen Sedimentschichten von Kratern können der Exobiologie und Exogeologie neue, wichtige Erkenntnisse verschaffen. Es ist z.B. hoch-wahrscheinlich, dass in Kratern in Polnähe Reste gefrorenen Wassers zu finden ist. Das HRSC der "Mars-Express"-Sonde der ESA lieferte z.B. im Februar 2005 während Orbit 1343 ein Bild von einem Krater in der Vastitas Borealis-Tiefebene, der Reste gefrorenen Wassers enthält. Die meisten extraterrestrischen Krater können aber aufgrund des rauhen und steilen Geländes mit den derzeitigen radgetriebenen Planetenrovern nicht erforscht werden.
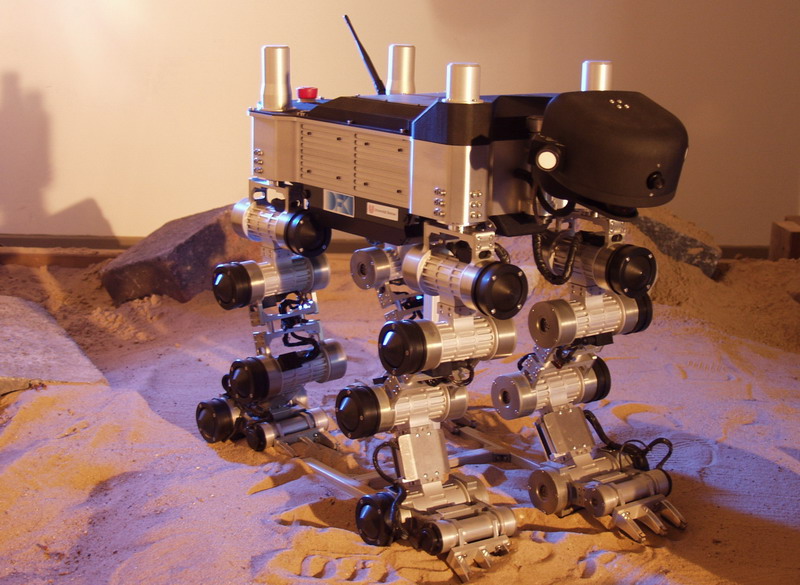
Der vierbeinige ARAMIES-Roboter besitzt 26 Gelenke: sechs pro Bein und zwei für die Bewegung des Kopfes. Dieser enthält eine Kamera, zwei Ultraschall-Abstandssensoren sowie einen 2D-Laserscanner. Zusätzlich verfügt der Roboter noch über Beschleunigungssensoren und ein Gyroskop zur Stabilitätskontrolle. Die Kontrolle der Gelenke wird erreicht mit Hilfe von absoluten Positionssensoren sowie Strom- und Temperatursensorik.
Ein großer Vorteil des ARAMIES Roboters im Vergleich zu anderen Laufrobotern ist sein aktuierter Fuß, der es ihm ermöglicht, in steilem Gelände sicheren Halt zu finden. In Labortests war der Roboter in der Lage, eine Sprossenwand mit einer Steigung von 70° zu bewältigen.
Jeder Fuß ist ausgestattet mit fünf Drucksensoren sowie einem nach unten gerichteten Infrarot-Abstandssensor zur zuverlässigen Feststellung des Bodenkontaktes.
Die modulare Steuerungs- und Leistungselektronik besteht aus einem PC104-System für komplexe Navigations- und Planungsaufgaben, einer MPC565/FPGA-Platine für die reaktive, verhaltensbasierte Kontrolle und fünf Motorsteuerungsplatinen, die von je einem FPGA gesteuert werden. Jede dieser Platinen kann bis zu sechs Motoren gleichzeitig ansteuern und alle analogen Sensorsignale eines Beines einlesen. Unter Benutzung von LVDS-Kommunikation können bis zu acht der Motorsteuerungsplatinen an die MPC565/FPGA-Platine angeschlossen werden.
Die bioinspirierte Software steuert die 26 Gelenke simultan mit zentralen Mustergeneratoren und Reflexmodellen, was eine wesentliche Verbesserung im Vergleich zur üblichen modell-basierten Robotersteuerung darstellt und den nötigen Rechenaufwand zugunsten hoher Energieeffizienz stark minimiert.
Videos
ARAMIES: Kletterfähigkeiten

ARAMIES besitzt 6 Gelenke in jedem Bein und zwei für den (mit Kamera, Laserscanner & Ultraschall-Abstandssensoren ausgestatteten) Kopf.