ARAMIES Integrationstudie

Ansprechpartner/in:
Technische Details
| Größe: | 80 x 44 x 70 (LxBxH in cm) |
| Gewicht: | ~30 kg |
| Stromversorgung: |
28,8V, 9Ah NiMh Batterien
|
| Antrieb/ Motoren: |
Faulhaber DC- Getriebemotoren
|
Organisatorische Details |
|
| Anwendungsfelder: |
Assistenz- und Rehabilitationssysteme
Weltraumrobotik |
| Verwandte Projekte: |
ARAMIES
Ambulating Robot for Autonomous Martian Investigation, Exploration and Science
(04.2004- 04.2007)
ARAMIES
Ein Laufroboter für autonome planetarische Erkundung
(04.2004- 04.2007)
|
| Dieses System ist nicht mehr aktiv im Einsatz. | |
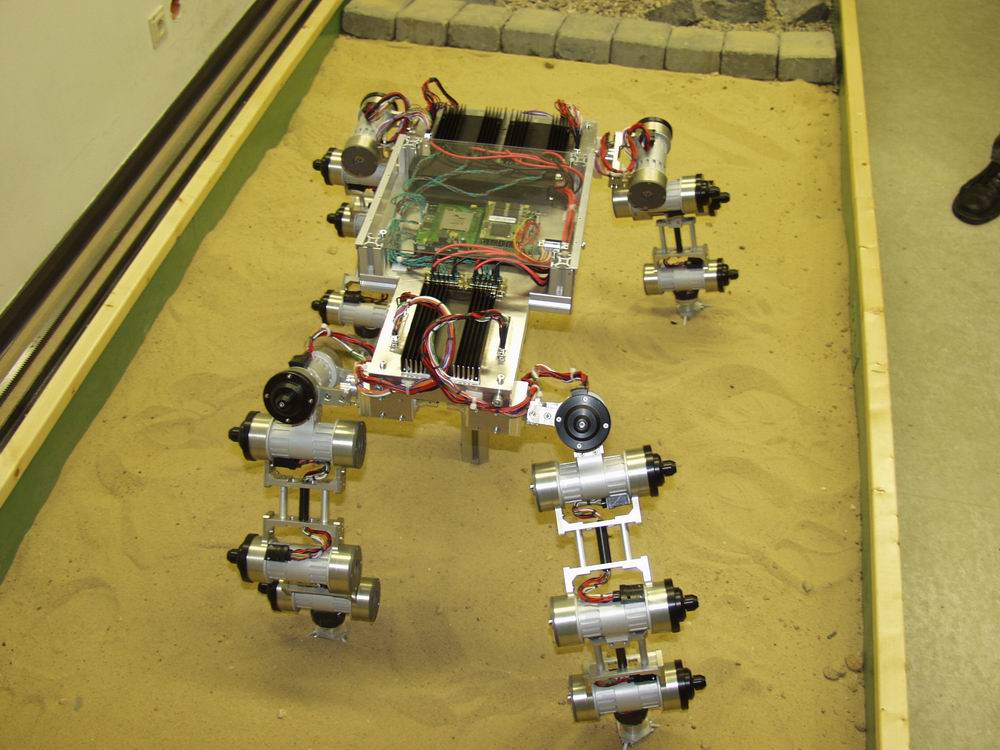
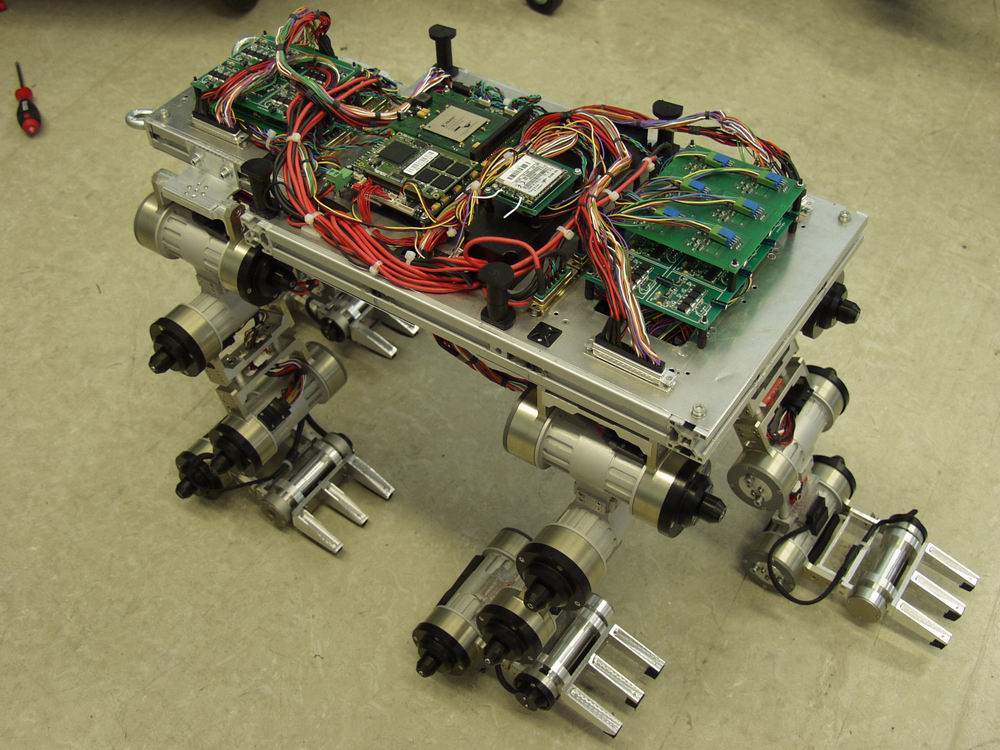
Systembeschreibung

Die komplette neue Entwicklung des Laufroboters ARAMIES mit Elektronik-, Mechanik- und Softwarekomponenten wurde durch die Vorstufe einer Integrationstudie vorbereitet. Die Integrationstudie gab den Entwicklern die Möglichkeit die Komponenten im Zusammenspiel zu testen, und den Prototypen in einer frühen Phase des Projektes zu optimieren.
Die Integrationsstudie gab zu dem die Möglichkeit, verschiedene Kinematiken und Laufmuster an dem realen System zu testen. Die Erfahrungen mit der Integrationstudie führte zu einer Optimierung und einem neuen Design fast aller Komponenten. Die Leistungsdaten der Integrationstudie können aus den Daten des Roboters ARAMIES abgeleitet werden.