Von der Exploration fremder Planeten über den Aufbau menschlicher Habitate bis hin zur Reparatur und Entsorgung defekter Satelliten im Orbit – Roboter spielen im Rahmen von Weltraummissionen eine zunehmend große Rolle. So ist ihr Einsatz in der Raumfahrt nicht nur deutlich risikoärmer als der von Menschen, sondern auch vergleichsweise kostengünstig. Dank Künstlicher Intelligenz können die Systeme autonom agieren und auf unvorhergesehene Ereignisse reagieren. Bislang eingesetzte Lösungen sind jedoch stark an die jeweilige Mission angepasst, weshalb sie veränderten Missionsanforderungen nicht oder nur bedingt gerecht werden können. Ein Umstand, der mitunter die Entwicklung komplett neuer Systeme erfordert und so die Missionskosten in die Höhe treibt.
Paradigmenwechsel hin zur Modularisierung in der Weltraumrobotik
Hier setzt das von der Raumfahrtagentur des Deutschen Zentrums für Luft- und Raumfahrt e.V. (DLR) mit Mitteln des Bundesministeriums für Wirtschaft und Technologie (BMWi) geförderte Projekt ModKom – Modulare Komponenten als Building Blocks für anwendungsspezifisch konfigurierbare Weltraumroboter – an, das auf einen Paradigmenwechsel in der robotischen Raumfahrt abzielt: weg von den üblicherweise monolithischen, hochspezialisierten und missionsspezifisch ausgelegten Robotern, hin zu für verschiedene Missionsszenarien frei konfigurierbaren Systemen.
Durch die Erforschung und den Aufbau eines modularen Baukastensystems für robotische Weltraumtechnologien wollen das Robotics Innovation Center des DFKI und die Arbeitsgruppe Robotik der Universität Bremen die Modularisierung in der Robotik weiter vorantreiben. Das Projekt baut auf den umfassenden Kompetenzen der Projektpartner in der Robotik auf, insbesondere auf Modularisierungskonzepten, die in vergangenen Projekten erarbeitet wurden. Zudem integriert es daraus hervorgegangene Technologien, etwa das Open-Source-Softwareframework „Rock“ oder die elektromechanische Schnittstelle EMI sowie weitere Hardware- und Softwarekomponenten, und entwickelt diese weiter.
Aufbau eines modularen Baukastensystems für Weltraumsysteme
Die geplante Baukastensystematik soll alle notwendigen software- und hardwaretechnischen Komponenten beinhalten, die es zum Aufbau frei konfigurierbarer mobiler Roboter braucht. Diese gliedern die Bremer Wissenschaftler*innen in unterschiedliche Granularitätsebenen: Zur untersten Granularitätsebene gehören beispielsweise Komponenten, die Grundfunktionalitäten zur Systementwicklung liefern wie Gelenke, Strukturelemente oder Elektronikbausteine. Untereinander lassen sich diese Funktionseinheiten mithilfe standardisierter Schnittstellen zu Subsystemen kombinieren, welche ihrerseits spezifiziert und auf einer höheren Granularitätsebene in den Baukasten aufgenommen werden.
Mit steigender Granularität wird schließlich eine Ebene von Funktionseinheiten erreicht, die den Aufbau ganzer Systeme ermöglicht, z.B. durch die Kombination von stationären und mobilen Plattformen mit Sensoreinheiten, Nutzlastcontainern oder Manipulatoren. Dank einer übergreifenden Softwarearchitektur können diese Systembausteine auch während der Laufzeit nach dem „Plug and Play“-Prinzip implementiert werden. Im Projekt entwickelte Schnittstellen sollen zudem den Einsatz von Lern- und Optimierungsverfahren ermöglichen, mit denen sich automatisch geeignete Hardware- und Softwarekonfigurationen generieren und einzelne Module an das Gesamtsystem anpassen lassen.
Flexibel, robust, kosteneffizient – Vorteile der Baukastensystematik
Die Vorteile der durch die Baukastensystematik angestrebten Modularisierung liegen auf der Hand: Zum einen wird es möglich sein, robotischen Systemen eine am Beginn ihrer Entwicklung nicht vorgesehene Funktionalität nachträglich hinzuzufügen. So sind sie in der Lage sich flexibel an die Anforderungen unterschiedlicher Missionen anzupassen. Durch die Wiederverwendbarkeit der einzelnen Module und Komponenten lassen sich zudem Entwicklungs- und Qualifizierungszyklen auf der Erde deutlich verkürzen und kostengünstiger gestalten.
Dank standardisierter Schnittstellen oder spezieller Adapter können auch ursprünglich nicht kompatible, kommerziell erhältliche Komponenten und Schnittstellen zum Baukasten hinzufügt werden, um dessen Portfolio und die Bandbreite möglicher Anwendungen zu erweitern. Ein weiterer Vorteil modularer Systeme ist ihre größere Robustheit gegenüber Ausfällen: So können fehlerhafte Module schnell und unkompliziert ausgetauscht und somit ein voll funktionsfähiger Roboter wieder hergestellt werden. Im Hinblick auf Anwendungen im Weltraumbereich ist diese Möglichkeit überaus vorteilhaft, ist es doch extrem schwierig, einen weit entfernten Roboter zu reparieren.
Leistungsdemonstration und Qualifizierung für den Weltraumeinsatz
Die Leistungsfähigkeit der in ModKom entwickelten Systematik wollen die Projektpartner anhand eines komplexen mobilen Manipulationssystems demonstrieren, das ausschließlich unter Verwendung des robotischen Baukastens realisiert werden soll. Dafür kombinieren sie einen modular aufgebauten Manipulator mit einer existierenden mobilen Kaufplattform. Durch den Einsatz kommerzieller Komponenten wollen die Forschenden nicht nur zeigen, wie bestehende externe Systeme in den Baukasten integriert, sondern auch, wie flexibel einzelne Elemente miteinander verbunden werden können. Ziel der Leistungsdemonstration ist es, mit dem Endeffektor des Manipulators Module zur Rekonfiguration auszutauschen, und so die Funktionsfähigkeit des Baukastensystems unter Beweis zu stellen.
Nicht zuletzt soll der Aspekt der Qualifizierbarkeit direkt in die Baukastenentwicklung einfließen: Als ein für robotische Anwendungen zentrales Modul wollen die Wissenschaftler*innen das Gelenk DFKI-X für den Weltraumeinsatz qualifizieren. Dazu wird es als Bestandteil des Baukastens derart ausgewählt und weiterentwickelt, dass ein möglichst breites Anwendungsspektrum abgedeckt und so eine optimale Wertschöpfung erreicht wird. Der erarbeitete Entwicklungs- und Qualifizierungsprozess soll auch dazu dienen, den Kosten- und Zeitaufwand für die Qualifizierung weiterer Module des Baukastens und damit dessen praktische Umsetzbarkeit für zukünftige Weltraummissionen abzuschätzen.
Das Projekt ModKom wird von der DLR-Raumfahrtagentur mit Mitteln des BMWi vom 1. Juli 2021 bis zum 30. Juni 2024 gefördert. Die Fördersumme beträgt rund 3,2 Millionen Euro.
Ansprechpartner am DFKI:
Dipl.-Ing. Roland Sonsalla
Deutsches Forschungszentrum für Künstliche Intelligenz GmbH (DFKI)
Robotics Innovation Center
E-Mail: roland.sonsalla@dfki.de
Tel.: +49 421 17845 4198
DFKI-Pressekontakt:
Deutsches Forschungszentrum für Künstliche Intelligenz GmbH (DFKI)
Team Unternehmenskommunikation Bremen
E-Mail: uk-hb@dfki.de
Tel.: 0421 178 45 4180
Aktuelles
Aus dem Baukasten: DFKI und Universität Bremen entwickeln modulare Funktionseinheiten für rekonfigurierbare Weltraumroboter

Die Roboter SherpaTT und Coyote III bei terretrischen Analogtests in Utah, USA. Die Systeme sind mit standardisierten elektromechanischen Schnittstellen ausgerüstet, die je nach Aufgabe das Andocken zusätzlicher Funktionsmodule, z.B. Manipulatoren oder Sensoreinheiten, ermöglichen. (DFKI, Florian Cordes)

Das Projekt ModKom baut auf den Erkenntnissen aus dem Projekt iStruct auf: Der darin entwickelte hominide Roboter Charlie ist dank modularer, biologisch inspirierter Sturkturelemente äußerst flexibel. (DFKI, Thomas Frank)

Flexible Nutzung des Baukastens für die Realisierung von missionsspezifischen Anforderungen (DFKI)
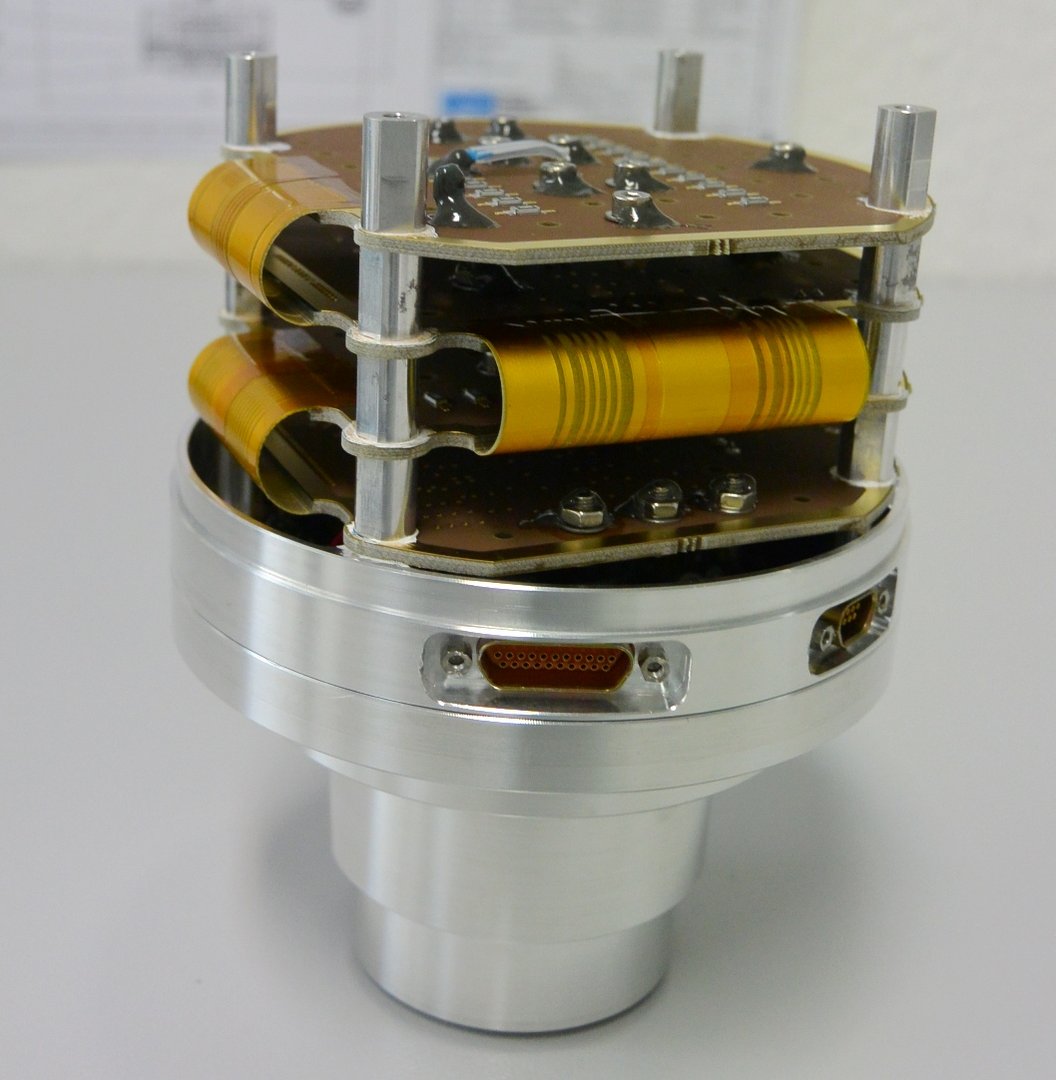
Das robotische Gelenk DFKI-X soll in ModKom weiterentwickelt und für den Weltraumeinsatz qualifiziert werden. (DFKI, Roland Sonsalla)