RH5
Humanoider Roboter als Assistenzsystem in menschoptimierter Umgebung

Technische Details
Systembeschreibung
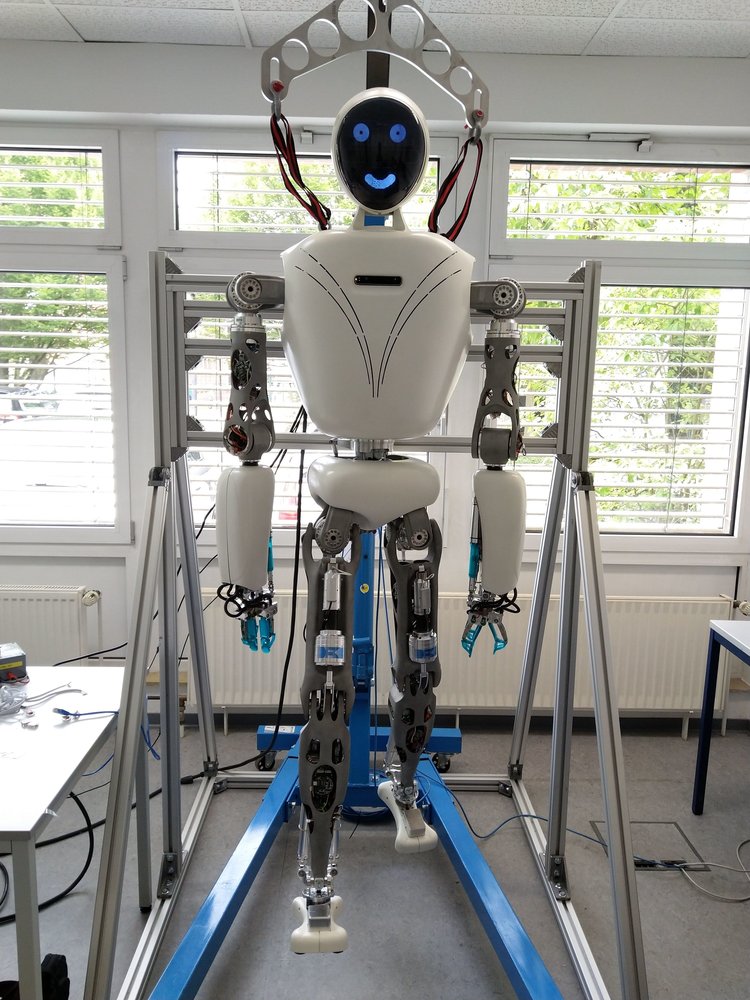
Der humanoide Roboter RH5 wurde als Assistenzroboter sowie vor dem Hintergrund langzeitautonomer Einsätze in für den Menschen gestalteter Umgebung, z.B. auf einer zukünftigen Mondstation, entwickelt. Sowohl für die Interaktion mit Menschen als auch für die Fortbewegung und Manipulation in einer Realumgebung, bietet sich eine humanoide Gestaltung des Roboters an. Neben dem autonomen und teilautonomen Einsatz soll der Roboter ebenfalls mittels eines Exoskeletts teleoperiert werden können, wobei die visuelle Wahrnehmung und wirkende Kräfte und Momente des Roboters mittels Methoden der virtuellen Realität der steuernden Person zur Verfügung gestellt werden.
In der mechanischen Entwicklung wurde eine hybride serielle und parallele Designarchitektur verfolgt, um ein leichtes Design mit zugleich hoher Steifigkeit und guten dynamischen Eigenschaften zu erreichen. Zum Einsatz kommen neben rotatorischen auch lineare Antriebseinheiten, um nichtlineare Übersetzungseigenschaften positiv nutzen zu können.
Videos
RH5: Motion Capture State Feedback für die Echtzeitsteuerung eines humanoiden Roboters
Das Video veranschaulicht die Ergebnisse der Veröffentlichung Mihaela Popescu, Dennis Mronga, Ivan Bergonzani, Shivesh Kumar, Frank Kirchner: "Experimental Investigations into Using Motion Capture State Feedback for Real-Time Control of a Humanoid Robot", zur Veröffentlichung angenommen: MDPI Sensors Journal, Sonderausgabe "Advanced Sensors Technologies Applied in Mobile Robot", 2022.
RH5: Entwurf, Analyse und Steuerung des Serien-Parallel-Hybridroboters RH5 Humanoid
In diesem Beitrag wird ein neuartiger seriell-paralleler Hybrid-Humanoid namens RH5 vorgestellt, der 2 m groß ist und nur 62,5 kg wiegt und in der Lage ist, schwere dynamische Aufgaben mit 5 kg Nutzlast in jeder Hand auszuführen. Die Analyse und Steuerung dieses Humanoiden wird mit einer Ganzkörper-Trajektorien-Optimierungstechnik durchgeführt, die auf differentieller dynamischer Programmierung (DDP) basiert. Zusätzlich stellen wir einen verbesserten kontaktstabilitätsabhängigen DDP-Algorithmus vor, der in der Lage ist, physikalisch konsistente Lauftrajektorien für den Humanoiden zu generieren, die über eine einfache PD-Positionskontrolle in einem Physiksimulator verfolgt werden können. Schließlich präsentieren wir erste experimentelle Ergebnisse mit dem humanoiden Roboter RH5.