AUVx
Ein miniaturisiertes autonomes Unterwasserfahrzeug

Technische Details
| Größe: | 393 x 188 x 200 mm³ |
| Gewicht: | 2.120g |
| Stromversorgung: |
9 NiMH Eneloop Akkus; 11,2 V / 2,3 Ah
|
| Geschwindigkeit: | 0.5m/s |
| Antrieb/ Motoren: |
3 um 180 ° drehbare am DFKI entwickelte Thruster mit Magnetkupplung; der Antrieb erfolgt mit Hilfe von Maxon-Getriebemotoren. Eine Besonderheit ist die verbaute Magnetkupplung die ein Eindringen von Wasser in den Motorraum verhindert.
|
| Sensoren: |
IMU: Analog Devices ADXL345 Beschleunigungssensor, Honeywell HMC5883L Magnetometer, Invensense ITG3200 Gyro
Drucksensor: Freescale MPX5100DP, Sensitivität 45 mV/kPa, Messbereich von 0 bis 100 kPa (4,5 mV/cm)
Kamera: 8 MP Pi camera
Eingebetteter Motorencoder zur Bestimmung der Drehzahl
|
| Kommunikation: |
Optisch oder kabelgebunden
|
| Rechenpower: |
Custom FPGA Board, DAEDALUS BaseBoard mit STM32 und Raspberry Pi Zero
|
| Maximale Tauchtiefe: |
10m
|
Organisatorische Details |
|
| Partner: |
Fraunhofer IIS |
| Fördergeber: |
Bundesministerium für Wirtschaft und Klimaschutz
Deutsches Zentrum für Luft- und Raumfahrt e.V. |
| Förderkennzeichen: | Das Projekt DAEDALUS wird gefördert von der Raumfahrt-Agentur des Deutschen Zentrums für Luft- und Raumfahrt e.V. mit Mitteln des Bundesministeriums für Wirtschaft und Technologie aufgrund eines Beschlusses des Deutschen Bundestages unter dem Förderkennzeichen 50NA1312 (DFKI). |
| Anwendungsfelder: |
Unterwasserrobotik
Weltraumrobotik |
| Verwandte Projekte: |
TRIPLE-GNC
TRIPLE-Guidance, Navigation & Control Teilvorhaben DFKI: akustische und visuelle Perzeption eines miniaturisierten autonomen Unterwasserfahrzeuges zur Erforschung subglazialer Seen
(06.2023- 09.2026)
TRIPLE-nanoAUV 1
Selbstlokalisierung und Perzeption eines miniaturisierten autonomen Unterwasserfahrzeuges zur Erforschung subglazialer Seen
(09.2020- 06.2023)
TRIPLE-MoDo
TRIPLE-Mobile Dockingssystem: KI-basierte Nahbereichsnavigation und Zielansteuerung für Soft-Robotic-basierte Dockinsysteme
(11.2020- 05.2023)
DAEDALUS
Modulare, energieautarke Trackingsysteme
(08.2013- 01.2017)
EurEx
Europa-Explorer
(12.2012- 04.2016)
|
| Verwandte Robotersysteme: |
µAUV
|


Systembeschreibung
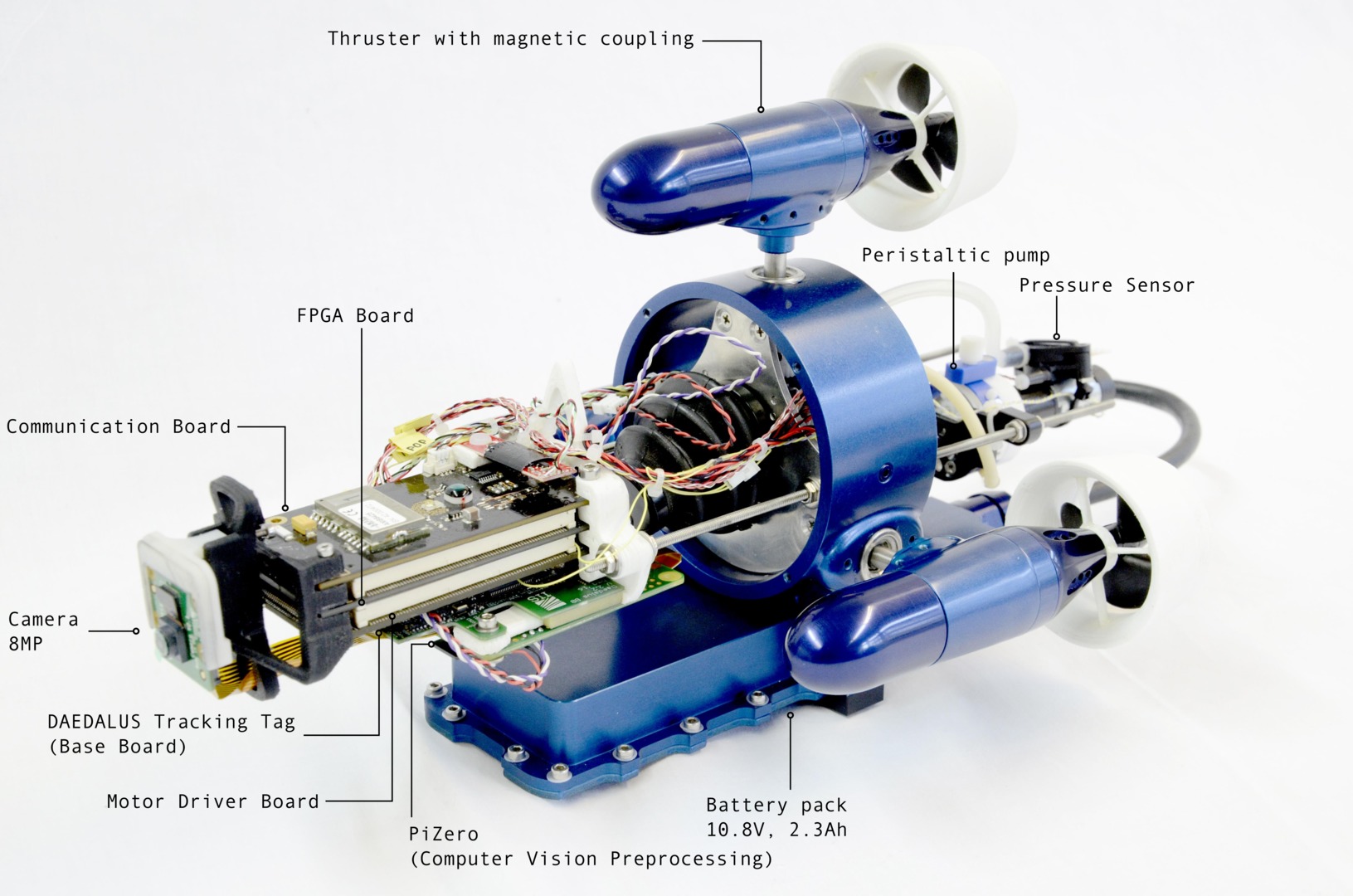
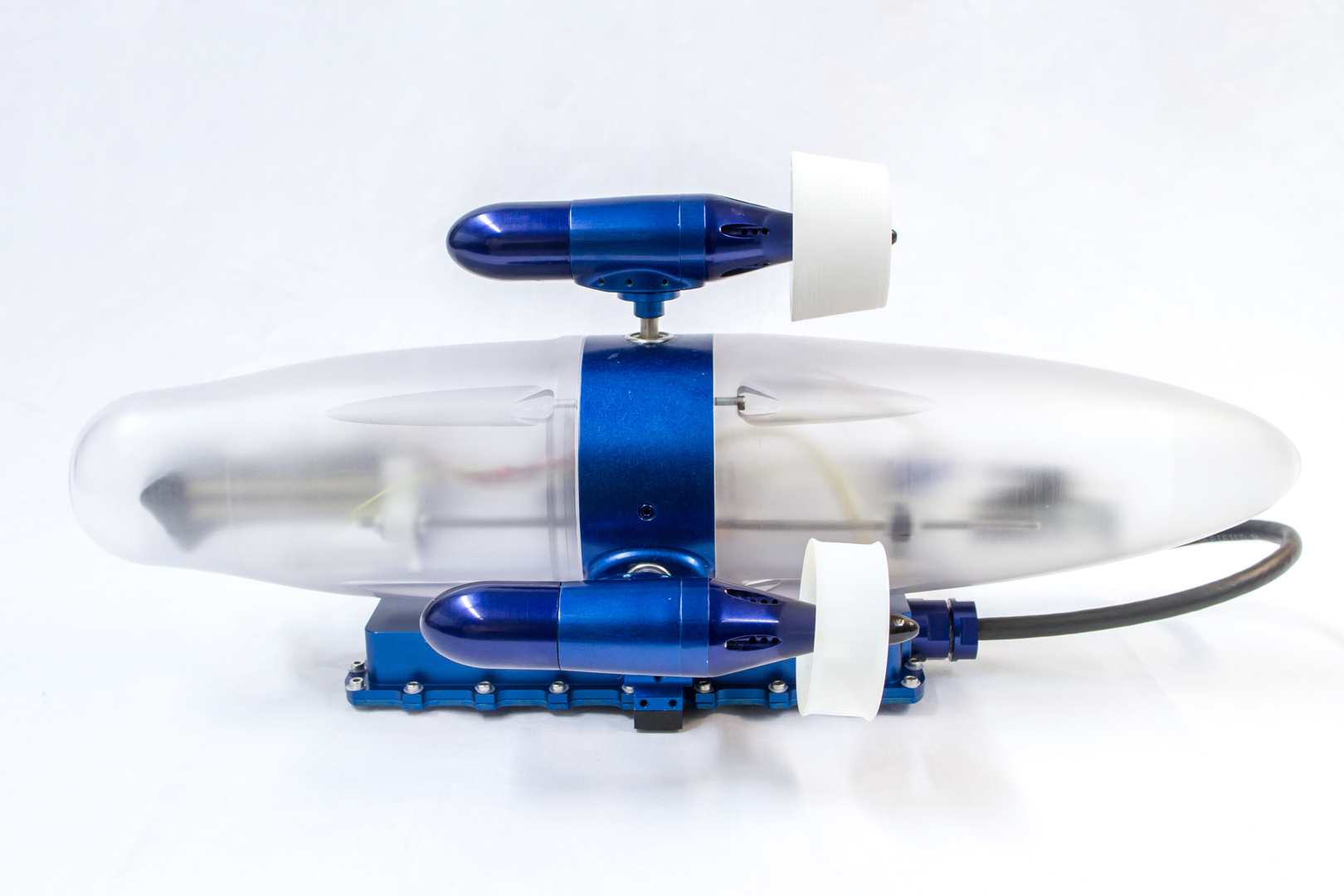
Das autonome Unterwasserfahrzeug AUVX ist als miniaturisiertes Explorations- und Forschungsfahrzeug konzipiert. Seine Form ist speziell auf die Anforderungen im Projekt EurEx angepasst – so ermöglicht ein geringer Durchmesser die Unterbringung im Eisbohrer des EurEx Projektes. Im Kontext von EurEx muss das AUVX dazu in der Lage sein, die als Referenzpunkte fungierenden µGlider zu finden oder Nahbereichserkundungen durchführen zu können. Hierfür ist das AUVX mit einer Vielzahl unterschiedlicher Sensoren ausgestattet. So gestattet eine Kamera, Unterwasseraufnahmen zu machen, die mit Hilfe von Bilderkennungsalgorithmen verarbeitet werden. All diese Eigenschaften ermöglichen es dem Fahrzeug, die in EurEx gestellten Anforderungen bestmöglich zu bewältigen. Im Projekt DAEDALUS dient das AUVX weiterhin als Demonstrator für die Anwendbarkeit des DAEDALUS Trackingtags in einem robotischen Kontext. Um den Energieaufwand bei der Fahrt unter Wasser zu minimieren wurde die Strömungshülle als logische Weiterentwicklung des µAUV² hydrodynamisch optimiert. Eine weitere Verbesserung betrifft die Thruster, die beim AUVX über eine Magnetkupplung verfügen. So ist sichergestellt, dass die empfindliche Elektronik im Inneren der Motorgondeln sicher vor dem umgebende Wasser geschützt ist. Neben dem vollautonomen Betrieb kann das AUVX auch als Hybrid-ROV (Remotely Operated Vehicle) mit einer optischen Kommunikation oder einem Kupferdrahtkabel aus der Ferne gesteuert werden.
Die Navigation basiert auf einer Fusion von Inertialsensordaten, einem mathematischen Modell und einer Markererkennung die mit Hilfe von OpenCV und ROS auf dem Raspberry Pi Zero implementiert wurde.
 und dem AUVx (rechts)")


, µAUV² (mitte) und dem AUVx (rechts)")






")
Fotogalerie