µAUV²

Technische Details
| Größe: | 27 x 7 x 7 cm |
| Gewicht: | 1.2 Kg |
| Stromversorgung: |
Lithium Polymer Batterie, 11.2V 4000mAH
|
| Antrieb/ Motoren: |
3x Maxon RE 10 DC Motors (1.5W, 6V) als Antrieb. Maxon Amax 16 DC Motor 6V
|
| Sensoren: |
µIMU (Eigenanfertigung) bestehend aus den folgenden Sensoren: 3x Accelerometer, 3x Gyroskope, 3x Magnetsensoren, Drucksensor, Encoder-module für die Motoren
|
| Kommunikation: |
Optische Kommunikation über "optisches IrDA": IrDA Protokollayer unter Verwendung von sichtbarem Licht zur Übertragung
|
| Sonstiges: |
alle Thruster um 180° drehbar, dadurch Bewegung in 4 Freitheitsgraden möglich, System on Chip Architektur unter Verwendung eines Virtex 4 FPGAs der LX Serie, Blackfin DSP, Micropumpe zur Auftriebskompensation (46.5 µl/s)
|
Organisatorische Details |
|
| Anwendungsfelder: | Unterwasserrobotik |
| Verwandte Projekte: |
µAUV
AI the Outlook in Marine Technology
(03.2006- 05.2007)
µAUV²
(05.2007- 11.2007)
DAEDALUS
Architectures and sensor data processing for energy-efficient control of self-powered tracking systems
(08.2013- 01.2017)
µAUV
KI Perspektiven in der Meerestechnik
(03.2006- 05.2007)
µAUV²
(05.2007- 11.2007)
DAEDALUS
Modulare, energieautarke Trackingsysteme
(08.2013- 01.2017)
|
| Dieses System ist nicht mehr aktiv im Einsatz. | |
Systembeschreibung
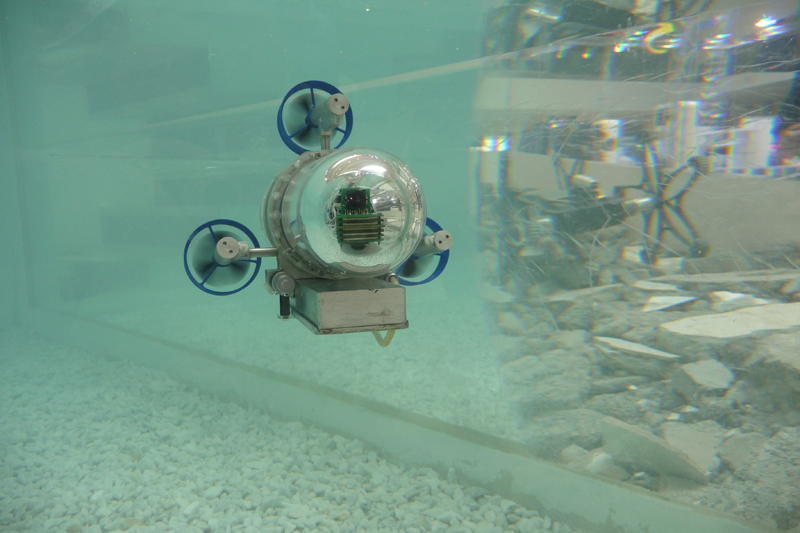
Das MicroAUV2 stellt eine Weiterentwicklung des MicroAUV dar. Neben der anspruchsvollen Antriebstechnik verfügt das MicroAUV2 über eine Auftriebskompensation. Zusammen mit einer Vielzahl an Sensoren kann dadurch das MicroAUV2 als Plattform zur Evaluation verschiedener Regelungsansätze für Unterwasserfahrzeuge in Kombination mit verhaltensbasierten Steuerungansätzen aus dem Bereich der künstlichen Intelligenz genutzt werden.
Derzeit befassen sich verschiedene studentische Arbeiten mit der Erweiterung der Autonomität des MicroAUV2 hinsichtlich Energieversorgung, Datenübertragung sowie adaptiven und selbstlernenden Regelungsmodellen.
Bei einer Erweiterung des MicroAUV2 um ein Kamerasystem ist zudem in Zusammenspiel mit den mächtigen on-Board Verarbeitungsheiten in Form eines digitalen Signalprozessors und eines FPGAs die Untersuchung von Unterwasser-Bildverarbeitungsalgorithmen möglich.
Videos
µAUV²: Erste Unterwassertests

Erste Unterwassertests des µAUV²