DAEDALUS
Modulare, energieautarke Trackingsysteme

Dateidownloads
Projektflyer DAEDALUS DEProjektflyer DAEDALUS EN
System Flyer AUVx DE
System Flyer AUVx EN
Existierende Trackingsysteme bieten auf Grund ihres hohen Energiebedarfs, ihrer Größe oder ihres begrenzten Einsatzgebietes keine zufriedenstellende Lösung für das langfristige Tracken von (kleinen) Objekten. Ziel des Projekts DAEDALUS war die Entwicklung von Technologien für verlustleistungsarme Trackingsysteme. Es wurde ein modulares, adaptierbares Trackingsystem für vielfältige Anwendungen realisiert, das im Baukastenprinzip verschiedenste Anforderungen befriedigen kann. Darüber hinaus wurde das autonome Unterwasserfahrzeug AUVx als Demonstrator für die Anwendbarkeit der Tagtechnologien im Bereich Robotik in diesem Projekt entwickelt.
| Laufzeit: | 01.08.2013 bis 31.01.2017 |
| Zuwendungsempfänger: | Deutsches Forschungszentrum für Künstliche Intelligenz GmbH |
| Fördergeber: |
Bundesministerium für Wirtschaft und Technologie
Deutsches Zentrum für Luft- und Raumfahrt e.V. |
| Förderkennzeichen: | Das Projekt DAEDALUS wird gefördert von der Raumfahrt-Agentur des Deutschen Zentrums für Luft- und Raumfahrt e.V. mit Mitteln des Bundesministeriums für Wirtschaft und Technologie aufgrund eines Beschlusses des Deutschen Bundestages unter dem Förderkennzeichen 50NA1312 (DFKI). |
| Partner: |
Fraunhofer IIS |
| Anwendungsfelder: |
Unterwasserrobotik
Weltraumrobotik |
| Verwandte Projekte: |
EurEx
Europa-Explorer
(12.2012-
04.2016)
|
| Verwandte Robotersysteme: |
AUVx
A miniaturized autonomous underwater vehicle
AUVx
Ein miniaturisiertes autonomes Unterwasserfahrzeug
µAUV
|


Projektdetails
Existierende Trackingsysteme sind nicht in der Lage, in verschiedenen Anwendungsbereichen eingesetzt zu werden. Daher hat das DFKI im Rahmen des Projektes DAEDALUS gemeinsam mit dem Fraunhofer IIS ein energieeffizientes Trackingsystem entwickelt, das an unterschiedliche Anwendungsszenarien angepasst werden kann. Das entwickelte System kann dabei sowohl im Innen- als auch im Außenbereich zur Lokalisierung eingesetzt werden. Waren, Menschen und Tiere können so getrackt und Parameter wie z.B. Erschütterung, Temperatur oder Puls überwacht werden.
Zur Anwendung kamen dabei die Kombination verschiedener Technologien wie GNSS und GSM. Im Verbund mehrerer Trackingtags können diese eine gemeinsame GSM Verbindung nutzen und so energieeffizient Daten an eine zentrale Visualisierungplattform senden. Mit Hilfe von Energy Harvesting können einzelne Tags energieautark betrieben werden.
Das DFKI hat dabei die Software für die zentrale Steuerungseinheit implementiert und das Sensorboard für das Anwendungsszenario Mensch entwickelt.
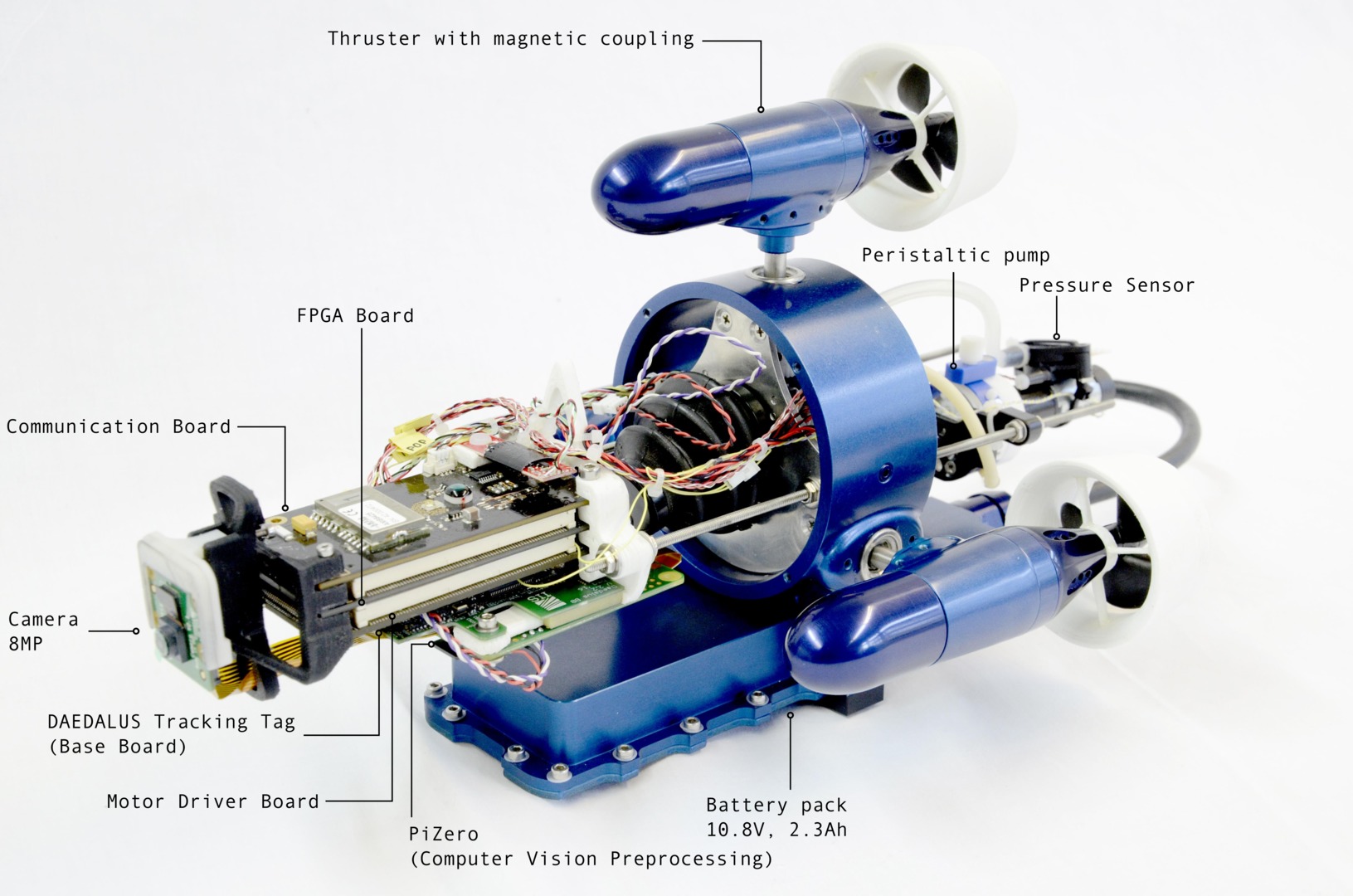
Das im Rahmen des Vorhabens DAEDALUS entwickelte AUVX ist ein autonomes, miniaturisiertes Unterwasserfahrzeug. Das Trackingtag dient hierin als zentraler Datenhub, dem Vorverarbeiten und Sammeln von Sensordaten und dem Versand der Daten an eine Visualisierungsplattform. Hiermit wurde der Nachweis der Einsetzbarkeit der entwickelten Technologien im Anwendungsgebiet Robotik geführt. Missionsszenario für das AUVX ist das EurEx Missionszenario. Das AUVX dient hier zur Erhöhung der Genauigkeit der Positionsbestimmung sowie der Nahbereichserkundung.
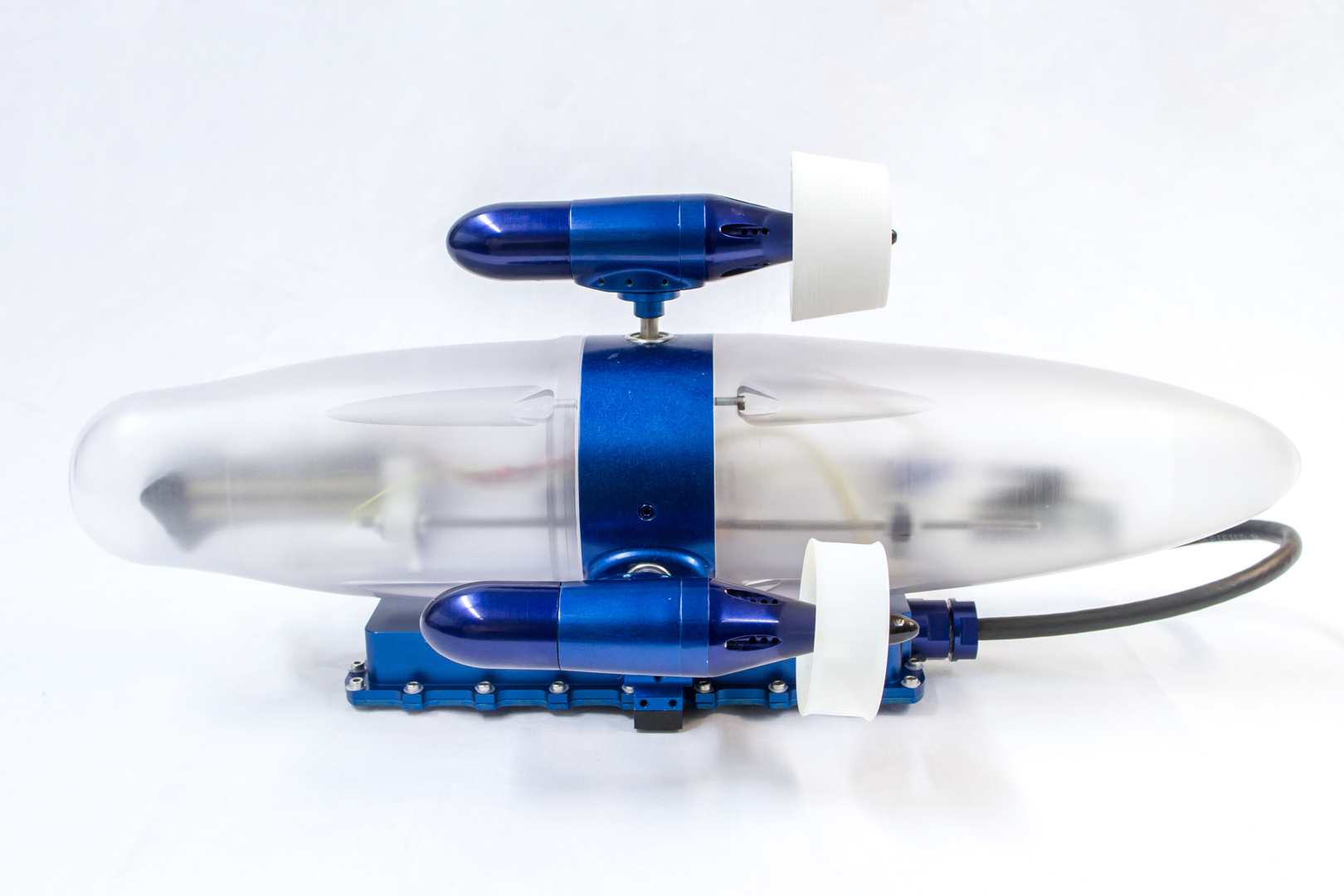
Besonderer Augenmerk bei der Entwicklung des Fahrzeugs lag mit Hinblick auf die Weltraumtauglichkeit auf einem enegieeffizienten Design. Insbesondere wurde die Hülle des AUVX strömungstechnisch optimiert, um energieeffizient durch das Wasser fahren zu können. Für die Low Level Steuerung wurde ein FPGA verwendet. Auch hier ist ein Weltraumbezug klar zu erkennen, da FPGAs seit vielen Jahren erfolgreich im Weltraum eingesetzt werden. Bei der Entwicklung des VHDL Modells konnte das Projektteam massiv von einer bereits existierenden DFKI internen Codebasis profitieren. Exemplarisch wurden in diesem Zusammenhang erstmalig am Institut ein Radiation Hardening Konzept (Triple modular redundancy) synthetisiert und bezüglich des Ressourcenverbrauchs evaluiert.
Die Form des Fahrzeugs wurde so angepasst, dass das AUVX in den in EurEx entwickelten Eisbohrer passt. Das AUVX vereint somit auf kleinstem Raum Fähigkeiten, die eigentlich weitaus größeren Systemen vorbehalten sind.
Videos
DAEDALUS: AUVx während eines Experiments am DFKI RIC

In diesem Video ist das AUVX im großen Becken des DFKI RIC zu sehen. Während seiner Fahrt durch das Wasser steuert das Fahrzeug selbständig Wegpunkte an die mit AprilTags markiert sind. Durch eine Fusionierung der Inertialsensorikdaten mit einem Modell des Fahrzeugs und den Daten aus der Bilderkennung ist das Fahrzeug dazu in der Lage, die komplette Mission autonom zu durchlaufen.
DAEDALUS: Das AUVx im Missionsszenario von EurEx

In dieser Videoanimation wird die Aufgabe des AUVX im EurEx Missionszenario dargestellt: Nachdem der Eisbohrer durch den Eispanzer des Jupitermondes Europa geschmolzen ist werden mehrere µGlider freigesetzt. Das AUVX beginnt nun die Positionen der µGlider zu bestimmen und die ermittelten Positionen an das autonome Forschungsfahrzeug Leng zu übermitteln.