AILA
Mobile Dual-Arm-Manipulation

{kind=link}
Technische Details
Systembeschreibung

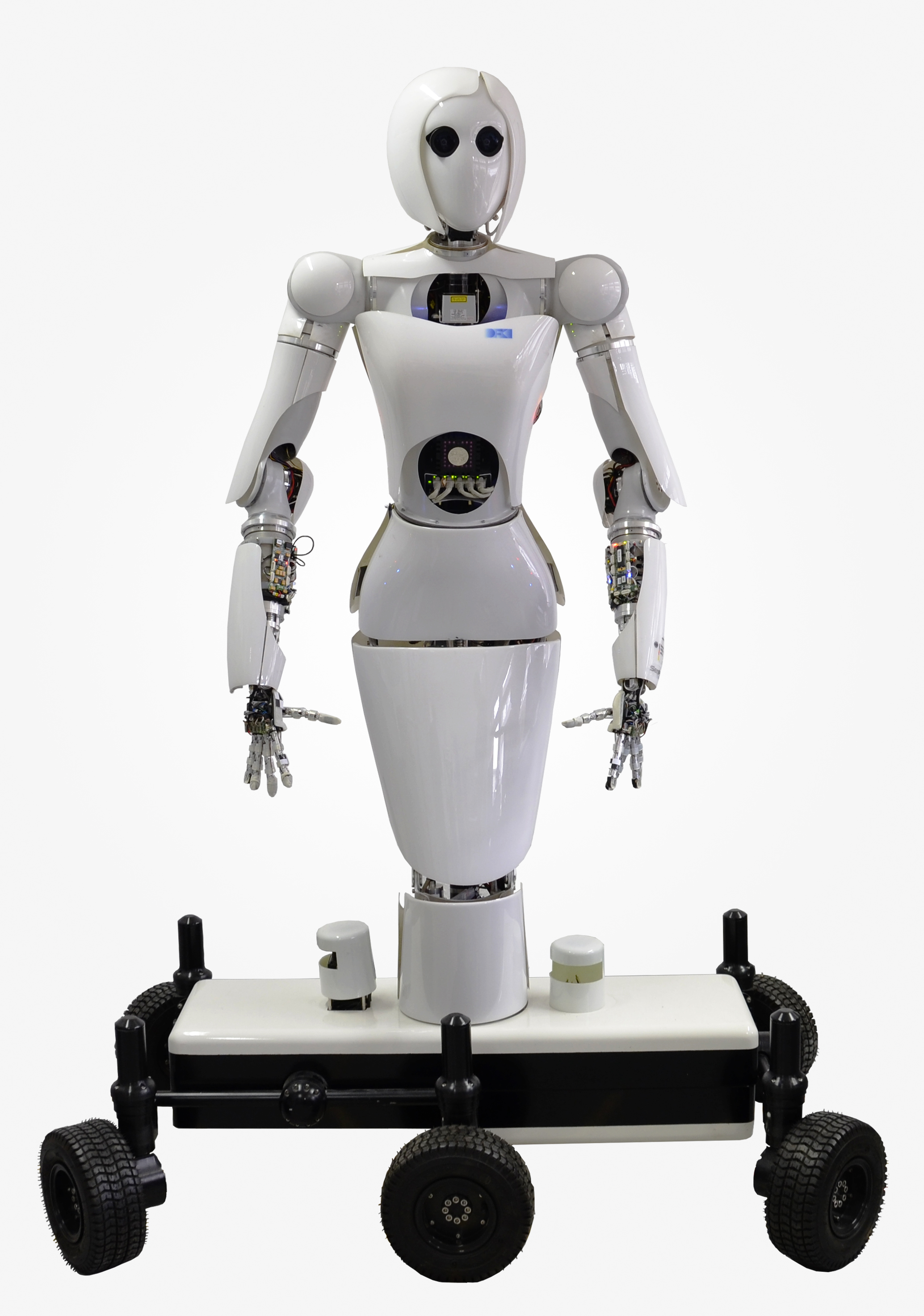
Der Roboter AILA ist ein mobiles, zweiarmiges Robotersystem, das als Plattform zur Forschung im interdisziplinären Bereich der mobilen Manipulation entwickelt wurde. Mobilität, Wahrnehmung, Manipulation und primär die Vereinigung dieser Fähigkeiten in einem System, das seine Umgebung wahrnehmen und verstehen kann, sich umher bewegen kann, Objekte manipulieren und deren Eigenschaften herausfinden kann sowie mit unstrukturierten Umgebung umgehen kann, ist das Ziel der Forschung in diesem Bereich.
AILA verfügt über 32 Freiheitsgrade, bestehend aus zwei Armen mit je 7 Gelenken, einem Torso mit 4 Gelenken, einem Kopf mit 2 Gelenken und einer mobiler Basis mit 6 Rädern mit je 2 Freiheitsgraden. Das primäre Ziel des Designs war, eine leichte Armkonstruktion zu entwickeln, die ein Verhältnis von Nutzlast zu Eigengewicht größer als eins aufweist. Zusätzlich wird durch den beweglichen Körper, der die zwei Arme trägt, der Arbeitsbereich des Roboters vergrößert. Mobilität wird zur Zeit durch die radbasierte Basis ermöglicht. Die Hardware des Roboters besteht aus:
- Zwei Prosilica GC780C Kameras, die ein Stereosystem als Einheit im Kopf bilden
- Ein sich periodisch neigender Hokuyo URG Laserscanner für den Nahbereich, eingebaut in der Brust, sowie eine Mesa SR-4000 3D Time of Flight (TOF) Kamera im Bauch des Roboters
- Zwei weit reichende Hokuyo UTM Laserscanner ermöglichen eine Rundumsicht für die mobile Basis
- Zwei 3,5 Zoll embedded PCs: einer für die Regelung der Bewegung, eingebaut im Kopf, und einer für die Navigation, eingebaut in der mobilen Basis
- Ein mini-ITX board in Kombination mit einer eigenständigen Grafikkarte zur Bildverarbeitung ist im Torso untergebracht
- Das Kommunikationsnetzwerk besteht aus fünf unabhängigen CAN-Bussystemen für die Regelung der beiden Arme, des Torsos sowie der Radmodule der Basis
- Die Kopfkameras, die drei Computer sowie die Außenwelt sind über zwei Switches per Gigabit-Ethernet verbunden
- Zwei sechs-Achsen Kraft-/Drehmomentsensoren in den Handgelenken des Roboters
- Im Hause entwickelte Gelenkelektronik, bestehend aus drei übereinander angeordneten Platinen (Versorgungselektronik, FPGA, Schnittstellen und Sensoren)
Videos
HySociaTea: Ausgewählte Highlights der finalen Projektdemo

Dieses Video zeigt ausgewählte Technologien im HySociaTea-Szenario: das Resourcenplanungsmodul, die Objekterkennung anhand der Eyetracker-Information beim Werker, die Sprach-Interaktion mit den Robotern und dem virtuellen Charakter Gloria, die autonomen Sequenzen der Roboter und die autonome Roboter-Roboter Interaktion.
HySociaTea: Autonome Roboter-Roboter Kollaboration zwischen Compi und AILA

Das Video zeigt die autonome Roboter-Roboter Kollaboration in HySociaTea unter Nutzung des TECS-Framework. Der Roboter Compi nimmt das Werkstück und meldet, dass eine Abholung nötig wird. AILA erkennt, dass sie diese Aufgabe ausführen kann und übernimmt. Bei der Übergabe gibt es ein Kommunikationsprotokoll zwischen beiden Robotern.
HySociaTea: Szenario Maßgefertigte Verpackung

Das Video zeigt den ersten Demo-Aufbau und Ablauf mit dem Hybriden Team.
BesMan: Erste Demonstration – Robotersystem AILA

Erste offizielle Demonstration: Ausführung einer autonomen Manipulationsaufgabe in einem Nachbau der ISS
AILA/CAPIO Exoskelett: Deutsch-russische Kooperation zur Fernsteuerung von Robotern

Ziel von dieser Demo ist, über die Exoskelette den humanoiden Roboter am anderen Standort – Bremen und die russische Stadt Magnitogorsk – zu kontrollieren.
AILA: ISS 2

Durchführung einer autonomen Mission im ISS-Setup.
AILA: ISS

Tele-Bedienung eines anthropomorphen Systems in der Weltraumrobotik.
AILA: Robofoot

Programmierung von Armbewegungen und Greifen mit mehreren Fingern nach Operator Demonstration.
AILA: Teleoperation mit Kinect

Diese Demo zeigt die tele-Bedienung von AILA mithilfe des KINECT sensors.
AILA: Autonomes Produktabwicklung (SemProm)

AILA benutzt RFID Informationen um Artikel aus dem Supermarkt zu sortieren.