TRAILER
Ein Verbund von Roversystemen für Lunare Erkundungs- und Beprobungsmissionen

Im Rahmen des TRAILER Projektes wird ein Verbund von Rovern entworfen, die sich je nach Missionssituation im physischen Verbund oder getrennt voneinander bewegen.
Projektdetails
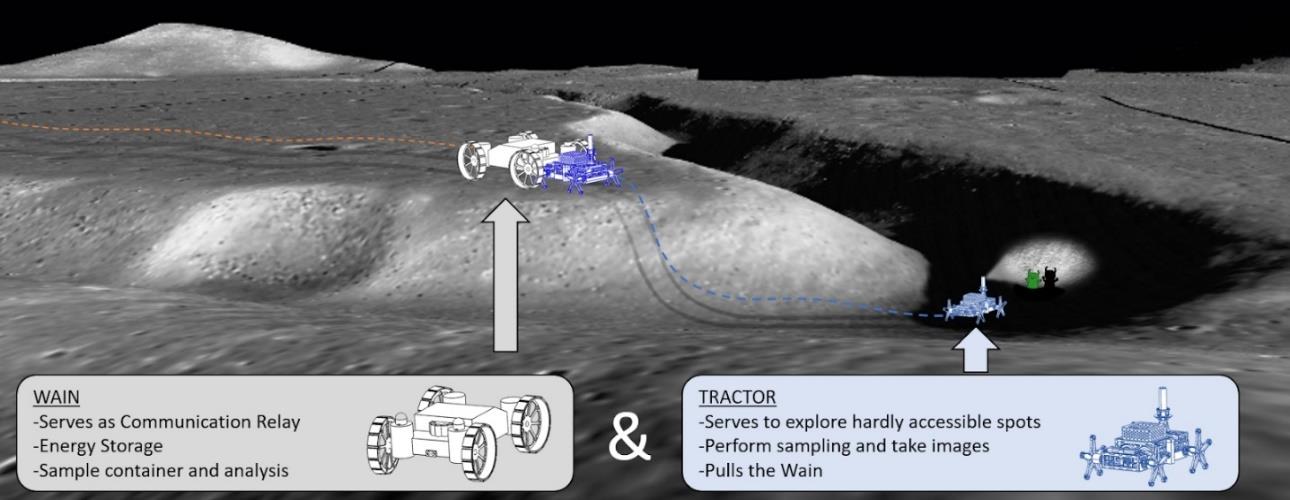

Das TRAILER Projekt zielt drauf ab, ein Verbundsystem, bestehend aus mehreren Rovern, für die lunare Exploration zu entwerfen. Das System wird aus (i) einem hochmobilen aber leichten Rover, dem sogenannten TRACTOR und (ii) einem größeren und weniger mobilen WAIN bestehen. Der TRACTOR bietet hohe Mobilität, erweiterte Navigationsfähigkeiten und ein Probennahmemechanismus, während der WAIN ein einfacheres Lokomotionssystem besitzt, dabei aber größere Mengen Energie speichern oder gewinnen kann, um den TRACTOR im kombinierten Zustand aufladen zu können.
Ziel des Projektes ist es, eine neue Roverarchitektur zu entwickeln, die darauf basiert, die Vorteile heterogener Systeme zu kombinieren um die jeweiligen Systemvorteile in kommenden lunaren Explorationsmissionen ausnutzen zu können. Die Subsysteme können elektromechanisch verbunden und wieder aufgetrennt werden. So sollen größere Strecken im Verbund bewältigt werden, während die Erkundung wissenschafltich interessanter Orte - diese sind typischerweise in schwer zugänglichem Gelände zu finden - von dem abgetrennten TRACTOR Subsystem vorgenommen wird.