FASTER
Forward Acquisition of Soil and Terrain data for Exploration Rover

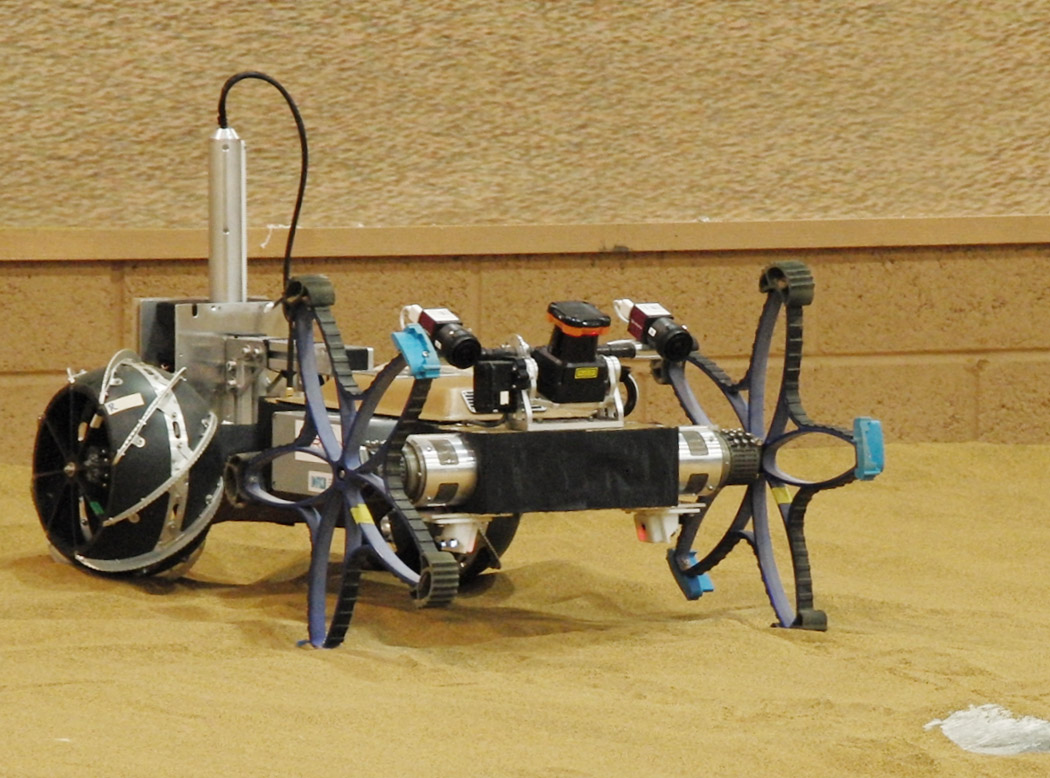
In FASTER entwickelt ein europäisches Konsortium mit sechs Partnern aus vier Mitgliedsländern Konzepte und einen Demonstrator zur effizienten in-situ Messung der Boden- und Geländeeigenschaften von geplanten Fahrstrecken eines planetaren Erkundungsfahrzeugs (Rover). Diese Informationen erlauben es, genauere und verlässlichere Annahmen über die Befahrbarkeit zu berechnen. Dies wird dazu beitragen, dass sich ein planetarer Rover schneller und mit einem geringeren Risiko steckenzubleiben (z.B. in weichem Sand) fortbewegt. Die Hauptbestandteile des FASTER Systems werden ein sehr leichter Bodensensor und ein kleines geländegängiges Aufklärungsfahrzeug (Scout) sein.
| Laufzeit: | 01.11.2011 bis 30.11.2014 |
| Zuwendungsempfänger: | Deutsches Forschungszentrum für Künstliche Intelligenz GmbH |
| Fördergeber: | Europäische Union |
| Förderkennzeichen: | Gefördert durch die Europäische Union FP7-SPACE SPA.2011.2.1-02 GA284419 |
| Partner: | University of Surrey (UK), Airbus DS (UK), Space Application Services (BE), Liquifer Systems Group (AU), Astri Polska (PL) |
| Anwendungsfelder: | Weltraumrobotik |
| Verwandte Robotersysteme: |
Coyote II
High Mobile Micro Rover
Coyote II
Hochmobiler und Modularer Mikro-Rover für Kooperative Aufgaben
|
| Verwandte Software: |
MARS
Machina Arte Robotum Simulans
MARS
Machina Arte Robotum Simulans
|

Projektdetails

Das Ziel des Projekts FASTER ist es, drei verschiedene Themen planetarer Exploration zu behandeln:
- Verfahren zur vorausschauenden Charakterisierung von Oberflächenbeschaffenheiten
- Innovative Antriebssysteme für ein Aufklärungsfahrzeug (Scout-Rover)
- Kooperativer Einsatz eines Scout- und eines Mother-Rovers.
Im Projekt werden Methoden und Instrumente entwickelt, mit der die planetaren Oberflächeneigenschaften, auf denen robotische Fahrzeuge sich bewegen sollen, ermittelt werden. So sollen mögliche Gefahren (z. B. lockerer Flugsand) noch vor dem Befahren der entsprechenden Gebiete, erkannt werden.
Es werden Konzepte entwickelt und umgesetzt, die das Risiko, dass der Scout-Rover selbst in eine kritische Lage gerät, minimieren.
FASTER wird die Machbarkeit und Leistungsfähigkeit einer kooperativen Nutzung von Mother- und Scout-Rovern beleuchten. Es sollen Methoden entwickelt werden, um einen autonomen kooperativen Betrieb des Mutterfahrzeuges und eines (oder mehrerer) Scout-Rover effizient zu gestalten.
Ein vorausfahrender Rover wird dabei mit Sensoren ausgestattet, die die Boden- und Geländebeschaffenheit erfassen. Mit diesen gewonnenen Informationen kann ein Risikomodell erstellt und Aussagen über eine mögliche Gefährdung für das nachfolgende Mutterfahrzeug gemacht werden. Die Reduzierung des Risikos beim Befahren und Durchqueren unterschiedlicher Geländeabschnitte erlaubt es Missionsplanern, die Erkundung planetarer Oberflächen sicherer zu gestalten.
Indem einer der größten Unsicherheitsfaktoren eliminiert wird (die Eigenschaften des Bodens, auf dem sich das Fahrzeug bewegt), ergeben sich neue Möglichkeiten zum effizienten autonomen Betrieb planetarer Rover.
Dies wird die Missionsdurchführung effizienter machen und – verbunden mit der erweiterten Datenlage auf Basis der neuen Sensorik – einen höheren wissenschaftlichen Erlös erzielen.
Die einzelnen Systeme sowie der wissenschaftliche Kontext von
FASTER werden in einem Dokumentationsvideo vorgestellt.
Bitte besuchen Sie für weitere Informationen auch die Webseite des Projekts: www.faster-fp7-space.eu
Videos
FASTER: Erkunde den Weltraum schneller und sicherer

Der im Projekt FASTER entwickelte Rover ist ein Demonstrator zur effizienten in-situ Messung der Boden- und Geländeeigenschaften von geplanten Fahrstrecken eines planetaren Erkundungsfahrzeugs.