SEARCH
Surface Exploration Android Remotely Controlled by Humans

Das Gesamtvorhaben bestand darin, einen funktionsfähigen Demonstrator eines kleinst- Explorationsrovers für eine lunare Mission zu entwickeln. Dieser soll sich durch eine leichte Bauweise effizient über unwegsame Oberflächen bewegen können. Das mechanische Design des Rovers wurde von der Walter Kern GmbH entwickelt und zur Integration an das DFKI Bremen geliefert. Am DFKI Bremen wurden die erforderlichen elektrischen Komponenten für das System ausgewählt, sowie ein smartes Powermanagement, bestehend aus Hard- und Softwarekomponenten entwickelt. Durch die Reduzierung der Komplexität war es ebenso Ziel des Vorhabens, die Systemkosten so gering zu halten, dass ein Ausfall im Rahmen einer Mission tolerierbar ist. Dafür wurden am DFKI verschiedene Speichertechnologien für das System untersucht.
| Laufzeit: | 01.08.2020 bis 31.01.2022 |
| Zuwendungsempfänger: | Deutsches Forschungszentrum für Künstliche Intelligenz GmbH |
| Fördergeber: |
Bundesministerium für Wirtschaft und Klimaschutz
Deutsches Zentrum für Luft- und Raumfahrt e.V. |
| Förderkennzeichen: | 50RA2041 |
| Partner: |
Walter Kern GmbH, Füssen |
| Anwendungsfelder: |
SAR- & Sicherheitsrobotik
Weltraumrobotik |
| Verwandte Projekte: |
TransTerrA
Semi-autonome kooperative Exploration planetarer Oberflächen mit Errichtung einer logistischen Kette sowie Betrachtung terrestrischer Anwendbarkeit einzelner Aspekte
(05.2013-
12.2017)
SAMLER-KI
Semi-Autonomer Microrover für Lunare Exploration mit Künstlicher Intelligenz
(11.2022-
10.2025)
|
| Verwandte Robotersysteme: |
ASGUARD IV
Advanced Security Guard V4
Coyote III
Advanced Security Guard V4
Coyote III
Moon Vehicle
|


Projektdetails




Das Gesamtvorhaben bestand darin, einen funktionsfähigen Technologiedemonstrator eines kleinst- Explorationsrovers für eine lunare Mission zu entwickeln. Dieser soll sich durch eine leichte Bauweise effizient über unwegsame Oberflächen bewegen können. Das mechanische Design des Rovers wurde von der Walter Kern GmbH entwickelt und zur Integration an das DFKI Bremen geliefert. Am DFKI Bremen wurden die erforderlichen elektrischen Komponenten für das System ausgewählt, sowie ein smartes Powermanagement, bestehend aus Hard- und Softwarekomponenten entwickelt. Durch die Reduzierung der Komplexität war es ebenso Ziel des Vorhabens, die Systemkosten so gering zu halten, dass ein Ausfall im Rahmen einer Mission tolerierbar ist. Dafür wurden am DFKI verschiedene Speichertechnologien für das System untersucht.
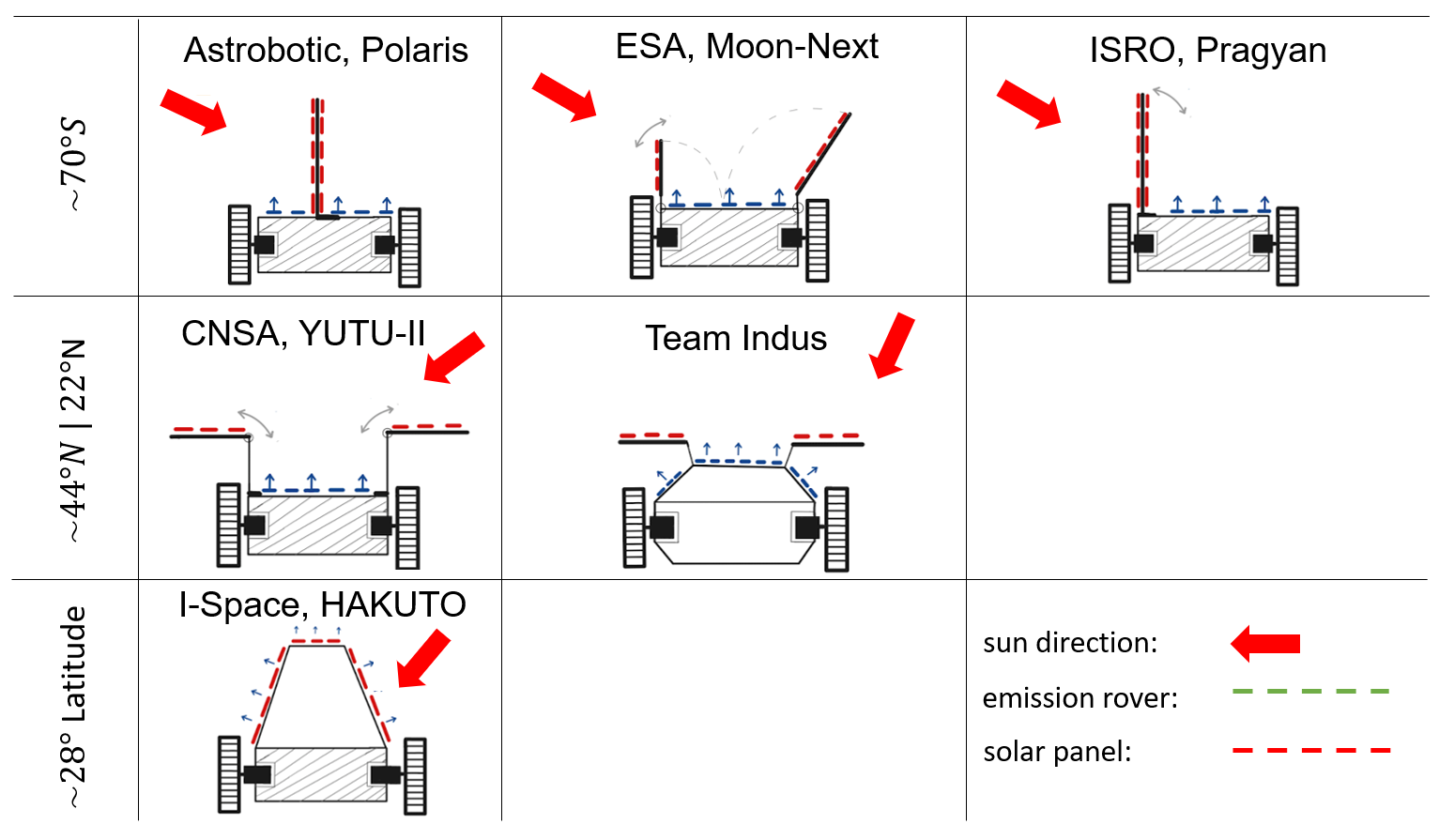
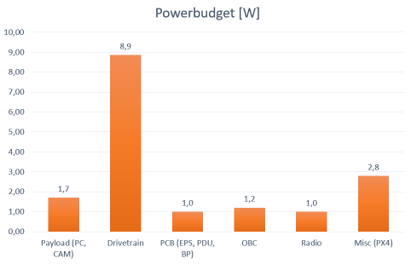
Zur Umsetzung der Ziele wurde zunächst verschiedene Konzepte des Systemdesigns unterschiedlichster Rover analysiert. Diese sind stark abhängig vom anvisierten Breitengrad für die Landung des Systems auf dem Mond (Abb. 1). Für einen möglichst realistische und generische Auslegung unter Berücksichtigung eines passiven Thermal Control Systems (Abb. 2) wurde die Anordnung der Solarzellen auf dem Rover pyramidenförmig gewählt und das Powerbudget des Systemdesgins (Abb. 3) dahingehend angepasst. Abbildung 4 zeigt des CAD-Modell des fertigen Rovers MoVe (Moon Vehicle).
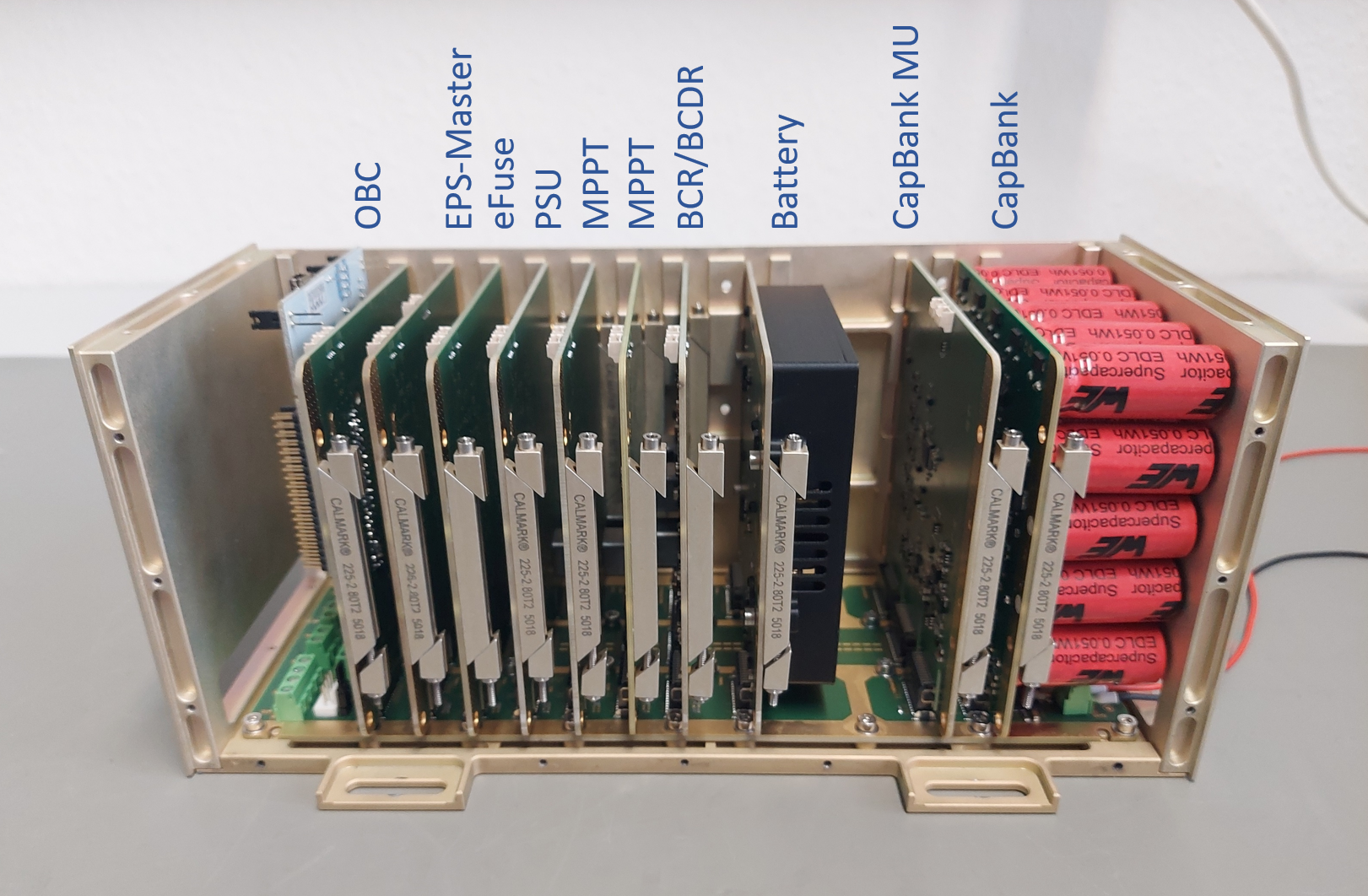
Der Hauptfokus am DFKI lag auf der Entwicklung des Electrical Power Systems (EPS) des Rovers. Hierfür wurde eine modulare Architektur entworfen, die es ermöglicht einzelnen Technologien für die Energiespeicher und Solarregler auszutauschen. Für die Module wurde auf COTS-Komponenten zurückgegriffen, was sich aufgrund der Chipkrise als Herausforderung darstellte. Abbildung 5 zeigt das Blockschaltbild des Rovers. Module für das OBC, VCU, Motor Controller und Payload, COM wurden als fertige Komponenten mit Weltraum äquivalenten Massen- und Leistungseigenschaften bezogen. Abbildung 6 zeigt den Umfang der entwickelten elektrischen Komponenten für das System welche über eine Backplane und eine Einschubsystem (Abb. 7) einfach und ohne zusätzliche Verkabelung integriert werden können.
Der Rover MoVe (Abb. 8) dient somit als System der Erprobung verschiedener Konfigurationen und Technologien des EPS für die zukünftige Exploration im Weltraum. Im Projekt SEARCH wurde vor allem die Verwendung von Superkondensatoren, welche im Vergleich zu chemischen Speichern wenig temperaturabhängig sind, untersucht. Diese Technologie kann in Zukunft dazu dienen Systeme mit geringerer Komplexität und hoher Robustheit zu entwickeln. Video 1 zeigt das System in einem vereinfachten Teststand zur Simulation der Sonneneinstrahlung und reduzierter Schwerkraft unter mondähnlichen Bedingungen.
Videos
SEARCH - Manufacturing Test for PCB Mounted Solar Cell Assemblies
SEARCH: MoVe im Testbett
Testen des Rovers unter mondähnlichen Bedingungen mit simuliertem Sonnenlicht und reduzierter Schwerkraft