BRIO Labyrinth
Testbed for the development of learning architectures

Contact person:
Technical Details
| Size: | 41,4 x 39,5 x 13 (LxBxH in cm) |
| Power supply: |
240 V ext. power supply for SCC-68 accessory
|
| Actuation/ Engine: |
3 x Dynamixel DX-117
|
| Sensors: |
4 x snap-action switch
2 x potentiometers/ Megatron MCP50
1 x piezo-sensor
1 x camera
|
| Accessory: |
ball-repository (automatic & manual), joystick, RS323/USB converter, NI SCC-68 I/O connector, LED for synchronisation purpose
|
Organisational Details |
|
| Application Field: | Assistance- and Rehabilitation Systems |
| Related Projects: |
VI-Bot
Virtual Immersion for holistic feedback control of semi-autonomous robots
(01.2008- 12.2010)
Labyrinth 1
Development of Learning Architectures and Experiments in Sensory Motor Learning
(06.2007- 12.2007)
Labyrinth 2
Setup as testbed for learning architectures and EEG/ fMRI- analysis
(01.2008- 01.2009)
|
| Related Software: |
pySPACE
Signal Processing and Classification Environment written in Python
MMLF
Maja Machine Learning Framework
|
| This system is not actively used anymore. | |
System description
The BRIO Labyrinth is a game of skill that requires concentration, coordination, perception and fine motor skills. By rotating two turrets a game disk is tilted in two planes and controls a steel ball through the maze. The further the ball rolls, the higher the score achieved. Therefore, it is important to avoid the holes. To function as testbed for BRIO Labyrinth, the normal game was rebuilt and extended as follows:
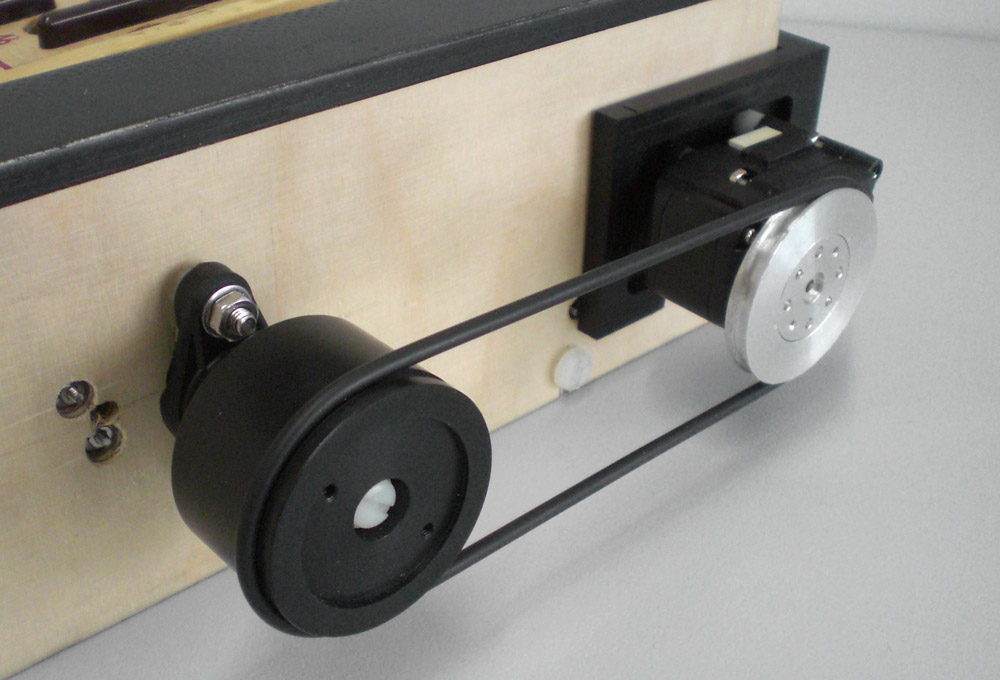
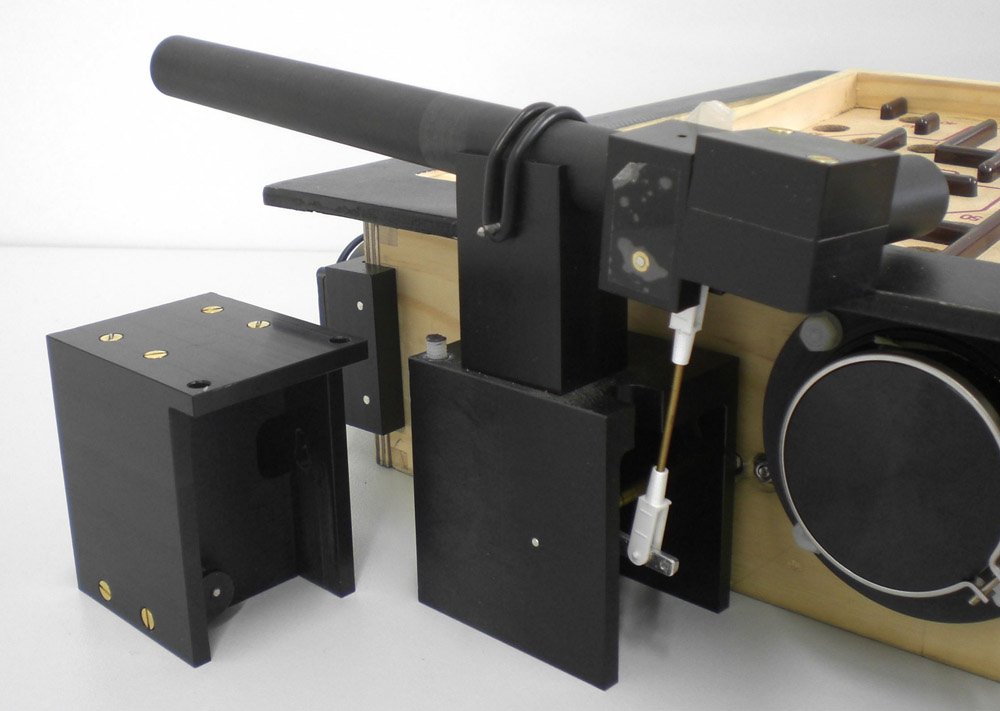
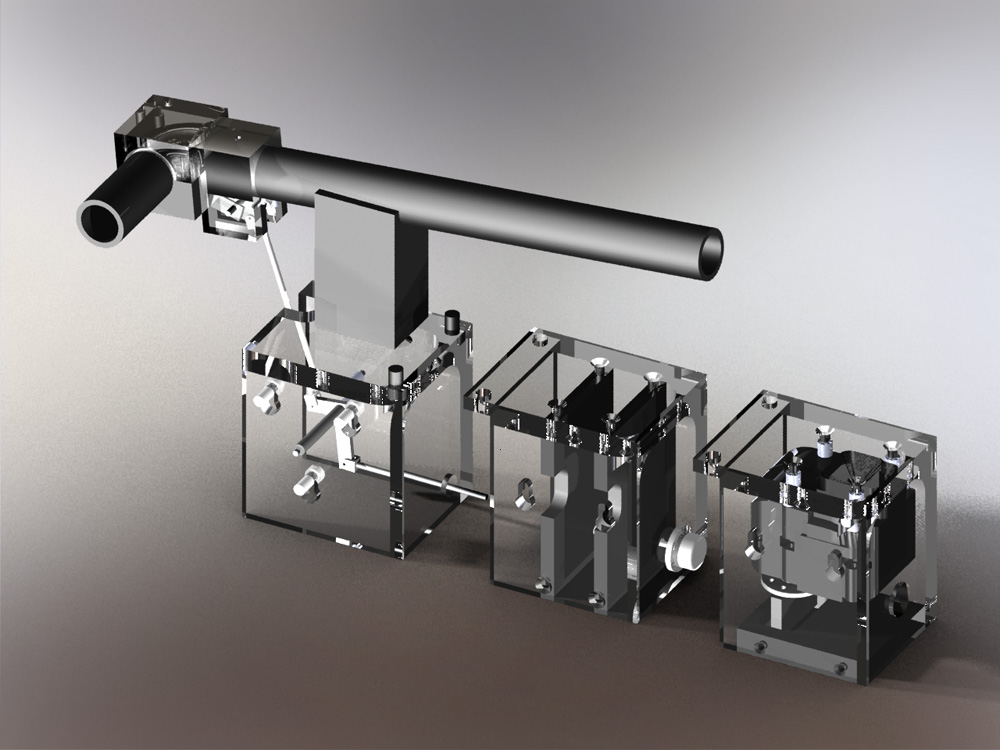
- Two modular mountable servo motors can be coupled with the knobs and allow the indirect control of the game using a joystick as well as potentially in the future in a virtual environment on a display. Four snap switch limit the working area of the playing surface in two dimensions and enable a calibration of the zero position of the servo motors.
- In conjunction with a camera, which records the playing area, the servo motors are controlled by artificial agents. For this purpose image processing algorithms to localize the ball can be used. Angle sensors detect the rotation of the axes. The sensor data from the angle sensor and the camera at any time represent the state of the system and allow the virtual agent to control the system. In addition, these sensors serve the recording of the behavior of the subjects. The behavioral data can be used for the evaluation of the recorded EEG and fMRI data.
- A piezoelectric sensor at the bottom of the game can register vibrations that occur when the ball passes through one of the holes. A modular ball Magazine was developed that can provide in this case both on a button or automatically for the agent in rapid succession up to 14 balls.
- All original magnetic parts have been replaced by non-magnetic parts in order to enable the use of the system in fMRI studies. This can also be replaced by the steel ball bullets from nonmagnetic materials such as ceramic or brass.
- A flashing light, the illumination is detected by the camera can be used for synchronization of behavioral and EEG / fMRI data and allows a comparison of the observed behavior when playing a subject and an artificial agent.
Videos
BRIO Labyrinth: Development of learning architectures and experiments in sensory motor learning

By playing the video, you accept YouTube's privacy policy.
The BRIO labyrinth game is used as a testbed for neurobiological studies of sensorimotori integration.
BRIO Labyrinth: Learned Policy

By playing the video, you accept YouTube's privacy policy.
Simulation of the learned policy at the BRIO Labyrinth.
BRIO Labyrinth: Brain Reading (Demonstration)

By playing the video, you accept YouTube's privacy policy.
In a telemanipulation-like scenario