VirGo4
Virtual state prediction for Groups of reactive autonomous Robots

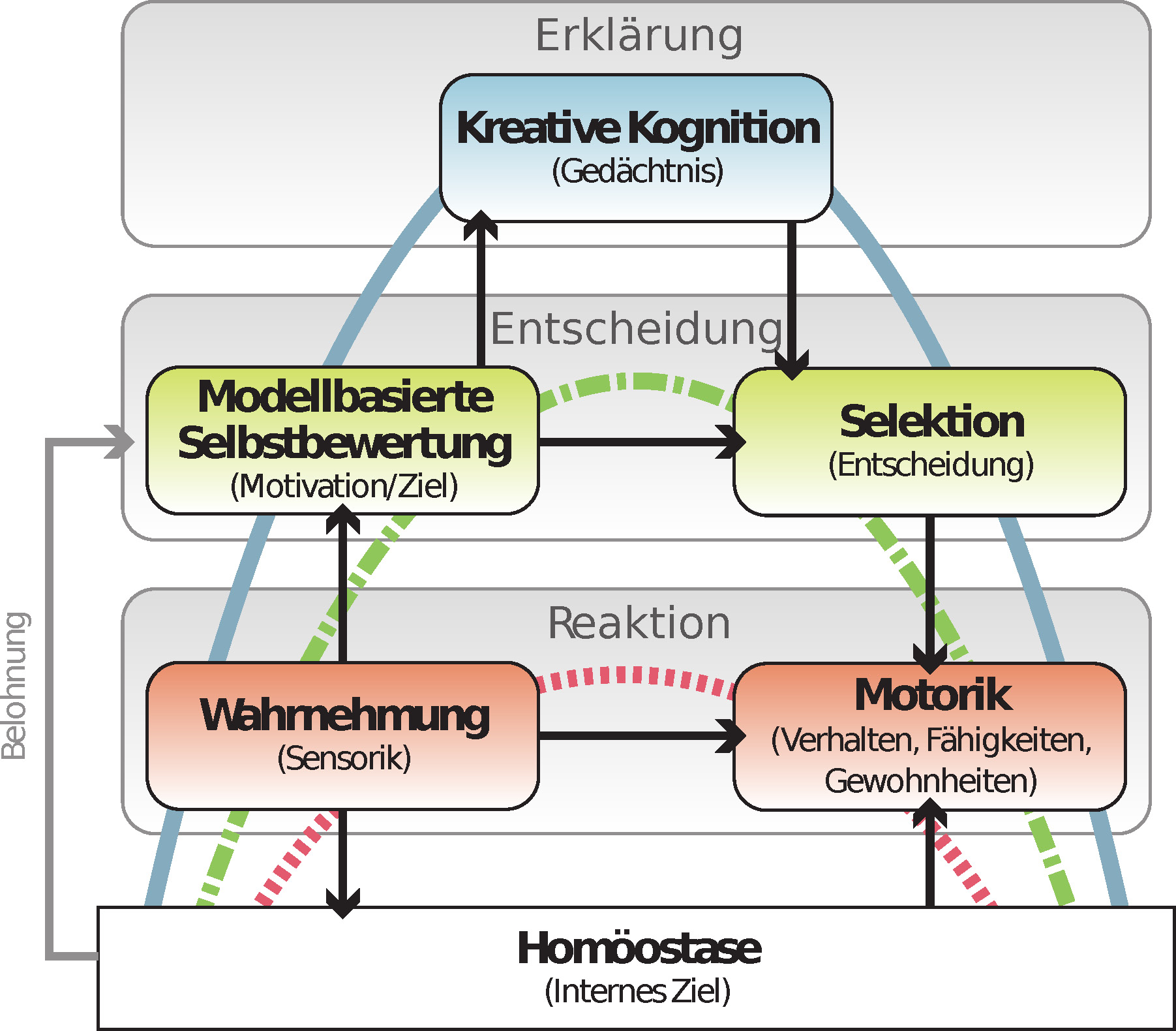
VirGo4 focuses on cooperative, adaptive, and reliable robots. Besides looking at the behaviour control of individual robots, mostly the anticipatory behaviour in teams is important in VirGo4. Two main goals are pursued: a platform-independent development methodology facilitates the realisation of modular distributed software-architectures that control individual robots and heterogeneous teams. The concept of the behaviour control system builds on a model of the decision processes in brains. VirGo4 focuses a prediction system that allows to assess the quality of actions taken. This way, the impact of an action taken could be estimated. Based on that, the behaviour of an individual or a team could then be adapted accordingly. The system state may be adapted according to the error between the predicted and the measured environmental properties. Several world models serve as a basis for decision-making: An egocentric world model represents the world view of a single robot. Based thereupon, an allocentric world model fuses information gathered from the other robots and further environmental data.
| Duration: | 01.04.2011 till 30.06.2014 |
| Donee: | German Research Center for Artificial Intelligence GmbH & University of Bremen |
| Sponsor: |
Federal Ministry of Economics and Technology
German Aerospace Center e.V. |
| Grant number: | Sponsored by the Space Agency (DLR Agentur), acting on a mandate from the Federal Government, grant no. 50RA1113 (DFKI) and 50RA1114 (University of Bremen). |
| Partner: | AG Robotik, Universität Bremen |
| Application Field: | Space Robotics |
| Related Projects: |
IMPERA
Integrated Mission Planning for Distributed Robot Systems
(04.2011-
03.2014)
|
| Related Robots: |
SeekurJr
Four-wheel, skid-steered mobile outdoor robot
|
| Related Software: |
pySPACE
Signal Processing and Classification Environment written in Python
|


Project details

Technical systems that operate in extreme or security relevant, extraterrestrial applications have to meet very specific requirements. This not only involves materials and mechanics but also software as one of the most fundamental components of robotic systems. Controlling the actuators, analysing and processing sensor data, and controlling the behaviour of a robot (and of a group of systems) are highly complex processes typically realised in software. Well-suites software development tools and a platform-independent development process are needed in order to also take non-functional properties like reliability into account. Especially for security-relevant applications this is mandatory, just as it is for the behaviour of robots in general. Autonomy may be a tool for improving the efficiency of robotics in many different areas like planetary missions. It must be guaranteed, however, that the autonomous behaviour does not affect reliability.
VirGo4 focuses on cooperative, adaptive, and reliable robots. Besides looking at the behaviour control of individual robots, mostly the anticipatory behaviour in teams is important in VirGo4. Two main goals are pursued: a platform-independent development methodology facilitates the realisation of modular distributed software-architectures that control individual robots and heterogeneous teams. The concept of the behaviour control system builds on a model of the decision processes in brains. VirGo4 focuses a prediction system that allows to assess the quality of actions taken. This way, the impact of an action taken could be estimated. Based on that, the behaviour of an individual or a team could then be adapted accordingly. The system state may be adapted according to the error between the predicted and the measured environmental properties. Several world models serve as a basis for decision-making: An egocentric world model represents the world view of a single robot. Based thereupon, an allocentric world model fuses information gathered from the other robots and further environmental data.
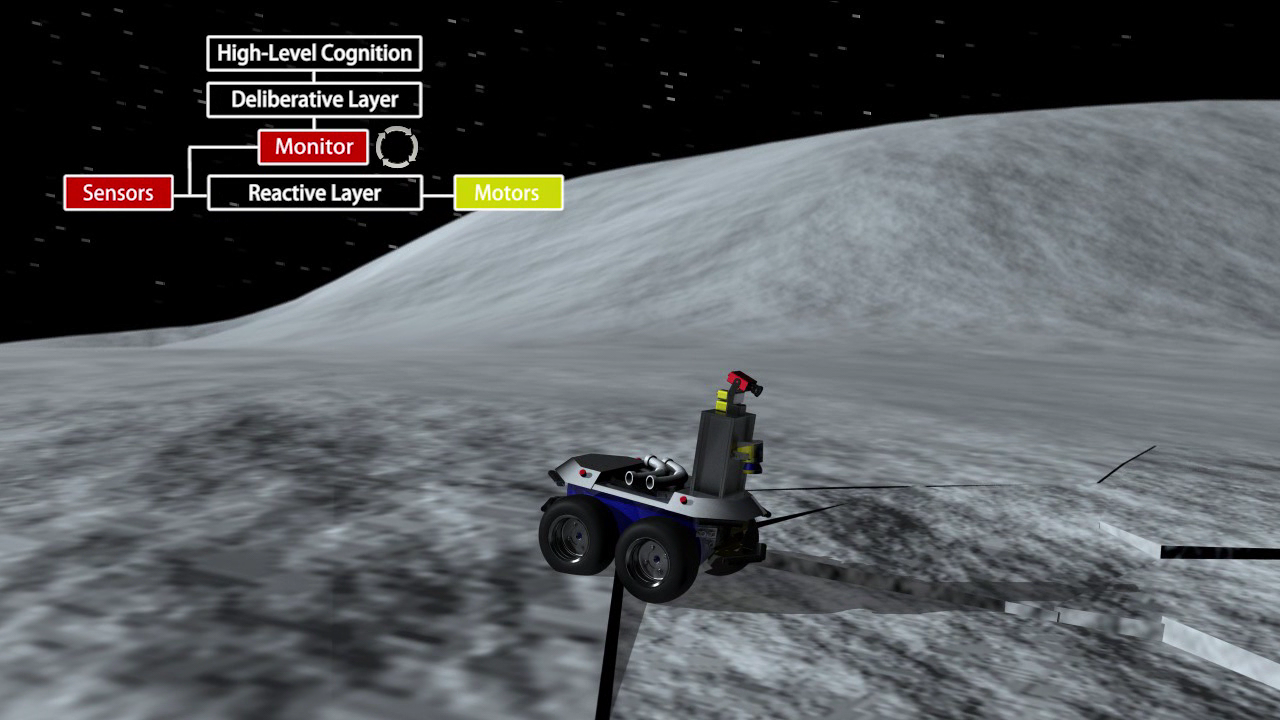
The VirGo4 robot control system is a redundant distributed system. Components may be executed redundantly several times. The system state may be monitored from remote in a distributed fashion. An evaluation at the end of the project will on the one hand prove VirGo4's extended capabilities in a lunar environment. On the other hand the internal state of the systems will be visualised appropriately.