VirGo4
Vorhersagesysteme in reaktiven Gruppen autonomer Roboter

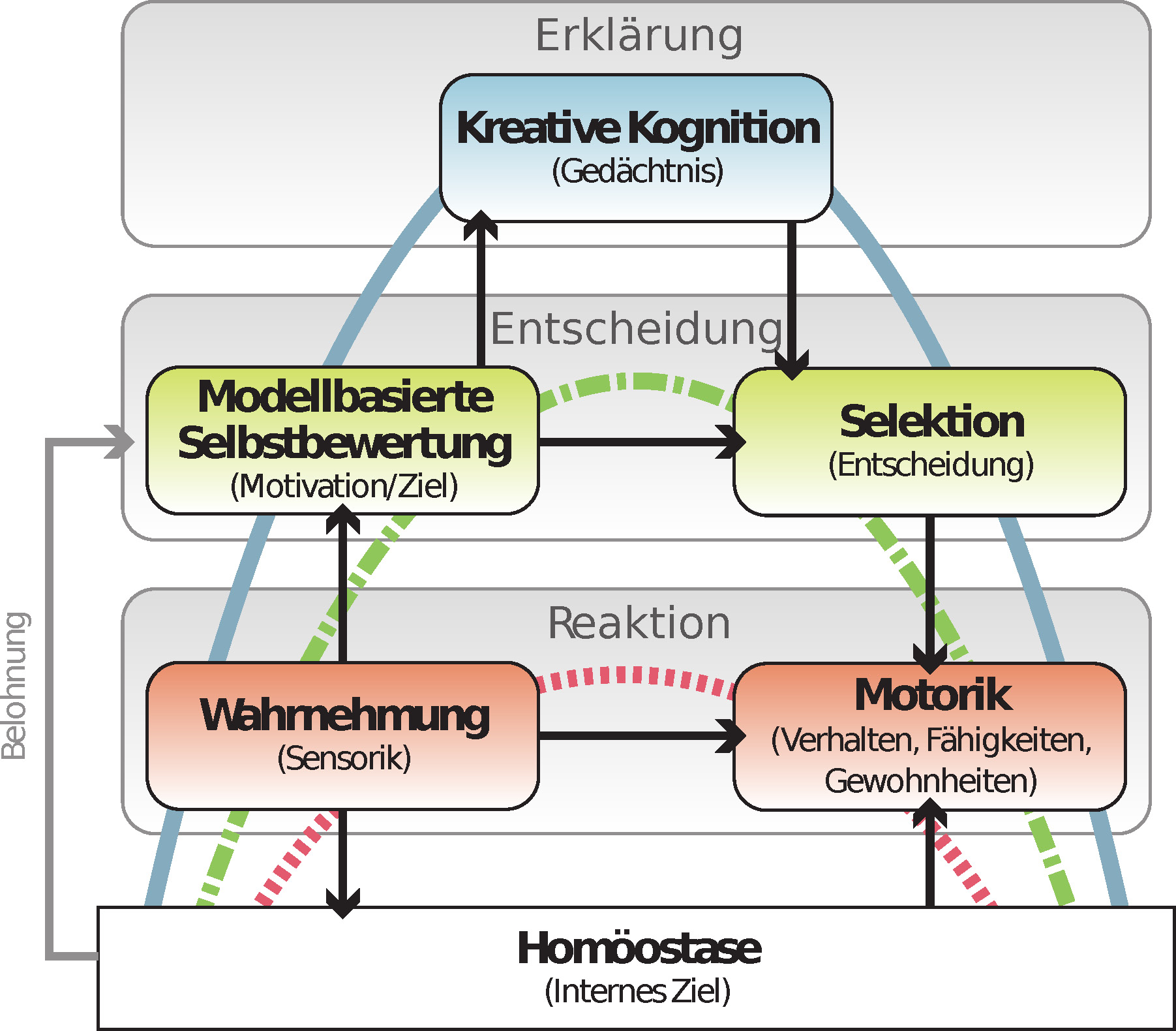
Bei VirGo4 stehen kooperativ-adaptive, zuverlässige Robotersystemen im Mittelpunkt. Neben der Verhaltenssteuerung einzelner Roboter ist besonders das antizipative Verhalten im Team von Interesse. In der Umsetzung verfolgt VirGo4 zwei Ziele: Eine plattformunabhängige Entwicklungsmethodik unterstützt die Realisierung von modularen, verteilten Software-Architekturen zur Steuerung von heterogenen Roboterplattformen und Teams. Das Konzept der Verhaltenssteuerung beruht auf einem Modell der Abläufe von Entscheidungsvorgängen in Gehirnen. Von zentralem Interesse ist dabei ein Vorhersagesystem, das es ermöglicht, die Güte von Aktionen zu bewerten. So können beispielsweise die Auswirkungen von Aktionen abgeschätzt und das Verhalten gegebenenfalls angepasst werden. Der Systemzustand kann anhand des Fehlers zwischen vorhergesagten und gemessenen Umgebungseigenschaften adaptiert werden. Als Entscheidungsgrundlage werden verschiedene Weltmodelle verwendet. Ein egozentrisches Weltmodell spiegelt die Sicht eines einzelnen Roboters wider. Ein darauf aufbauendes, allozentrisches Weltmodell vereint Informationen mehrerer Roboter und weitergehende Informationen aus der Umgebung.
| Laufzeit: | 01.04.2011 bis 30.06.2014 |
| Zuwendungsempfänger: | Deutsches Forschungszentrum für Künstliche Intelligenz GmbH & Universität Bremen |
| Fördergeber: |
Bundesministerium für Wirtschaft und Technologie
Deutsches Zentrum für Luft- und Raumfahrt e.V. |
| Förderkennzeichen: | Gefördert von der Raumfahrt-Agentur des Deutschen Zentrums für Luft- und Raumfahrt e.V. mit Mitteln des Bundesministeriums für Wirtschaft und Technologie aufgrund eines Beschlusses des Deutschen Bundestages unter dem Förderkennzeichen 50RA1113 (DFKI) und 50RA1114 (Universität Bremen) . |
| Partner: | AG Robotik, Universität Bremen |
| Anwendungsfelder: | Weltraumrobotik |
| Verwandte Projekte: |
IMPERA
Integrierte Missionsplanung für verteilte Robotersysteme
(04.2011-
03.2014)
|
| Verwandte Robotersysteme: |
SeekurJr
Vierrädriger mobiler Outdoor-Roboter
SeekurJr
Four-wheel, skid-steered mobile outdoor robot
|
| Verwandte Software: |
pySPACE
Signalverarbeitungs- und Klassifikationsumgebung in Python
pySPACE
Signal Processing and Classification Environment written in Python
|


Projektdetails

Technische Systeme, die in extremen oder sicherheitskritischen extraterrestrischen Anwendungen eingesetzt werden, müssen speziellen Anforderungen genügen. Dies betrifft Materialien und Mechanik, bei Robotersystemen aber besonders auch die Software als zentralen Bestandteil des Gesamtsystems. Die Ansteuerung der Aktuatorik, Auswertung und Verarbeitung von Sensordaten und Steuerung von Verhalten sind hoch komplexe, meist in Software realisierte Vorgänge. Geeignete Entwicklungswerkzeuge und ein entsprechend abstrakter Entwicklungsprozess sind nötig, auch nichtfunktionale Eigenschaften wie die Zuverlässigkeit einer Realisierung sicherstellen zu können, was vor allem für sicherheitskritische Anwendungen unbedingt erforderlich ist. Dies betrifft im Besonderen das Verhalten von Robotern. Autonomie kann die Effektivität von Robotersystemen in vielen Bereichen wie bei planetaren Missionen wesentlich verbessern, jedoch muss sichergestellt werden, dass das autonome Verhalten die Zuverlässigkeit nicht beeinträchtigt.
Bei VirGo4 stehen kooperativ-adaptive, zuverlässige Robotersystemen im Mittelpunkt. Neben der Verhaltenssteuerung einzelner Roboter ist besonders das antizipative Verhalten im Team von Interesse. In der Umsetzung verfolgt VirGo4 zwei Ziele: Eine plattformunabhängige Entwicklungsmethodik unterstützt die Realisierung von modularen, verteilten Software-Architekturen zur Steuerung von heterogenen Roboterplattformen und Teams. Das Konzept der Verhaltenssteuerung beruht auf einem Modell der Abläufe von Entscheidungsvorgängen in Gehirnen. Von zentralem Interesse ist dabei ein Vorhersagesystem, das es ermöglicht, die Güte von Aktionen zu bewerten. So können beispielsweise die Auswirkungen von Aktionen abgeschätzt und das Verhalten gegebenenfalls angepasst werden. Der Systemzustand kann anhand des Fehlers zwischen vorhergesagten und gemessenen Umgebungseigenschaften adaptiert werden. Als Entscheidungsgrundlage werden verschiedene Weltmodelle verwendet. Ein egozentrisches Weltmodell spiegelt die Sicht eines einzelnen Roboters wider. Ein darauf aufbauendes, allozentrisches Weltmodell vereint Informationen mehrerer Roboter und weitergehende Informationen aus der Umgebung.
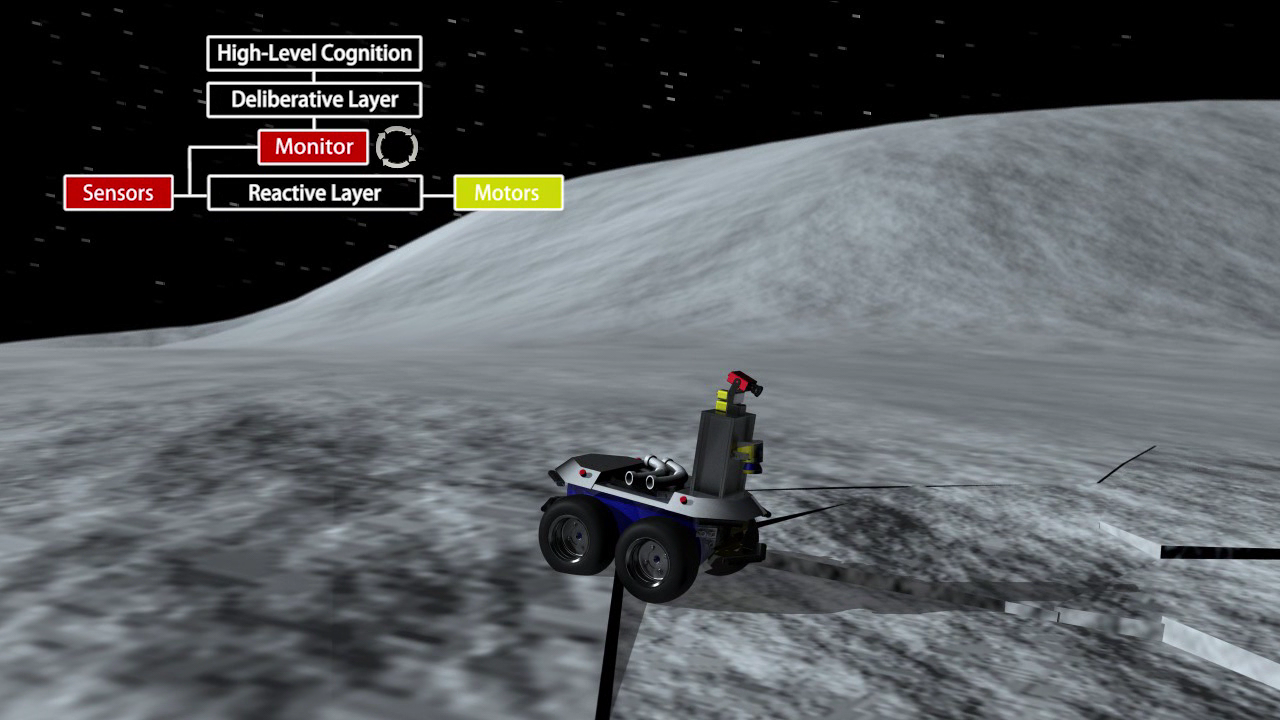
Das VirGo4-Softwaresystem zur Steuerung der Roboter wird als verteilt-redundantes System realisiert, wobei Komponenten mehrfach ausgeführt und der Systemzustand durch Monitoring-Komponenten entfernt überwacht werden können. Eine Evaluation am Ende des Projekts wird einerseits die erweiterten Fähigkeiten der Systeme in einer lunaren Umgebung zeigen, andererseits ihren internen Zustand darstellen und so die Abläufe und Entscheidungen visualisieren.