Stardust Reloaded
On-Orbit Servicing with Robotic Manipulators

The Stardust Reloaded project is a European research project funded by the Marie Sklodowska-Curie Actions Innovative Training Networks (ITN) action of the European Union Horizon 2020 (H2020) program. The project addresses the growing need for a sustainable exploitation of space, the resilience of the space environment, the threat and opportunities coming from asteroids, and the compelling need for properly trained specialists who can tackle these issues. Within the project, the research at DFKI tackles the development and experimental validation of an autonomous free-floating manipulator system for both the capture of non-cooperative targets and on-orbit servicing of cooperative ones.
| Duration: | 01.01.2019 till 30.06.2023 |
| Donee: | German Research Center for Artificial Intelligence GmbH |
| Sponsor: | European Union |
| Grant number: | This project has received funding from the European Union’s Horizon 2020 research and innovation programme under the Marie Sklodowska Curie grant agreement No 813644. |
| Website: | http://www.stardust-network.eu |
| Partner: |
University of Strathclyde, Università degli Studi di Roma "Tor Vergata", Universitatea Alexandru Ioan Cuza din Iași, Deimos Space S.L.U., Politecnico di Milano, Università di Pisa, Universidad Autónoma de Madrid, Academy of Athens, Deutsches Zentrum für Luft- und Raumfahrt e. V., University of Belgrade - Faculty of Mathematics, Technische Universiteit Delft, Hyperion Technologies B. V., Aristotele University of Thessaloniki, Universität Bremen, The University of Texas at Austin, Universidad Carlos III de Madrid, University of Arizona, University of Kyoto, European Space Agency - ESA, Centre national d'études spatiales - CNES, Airbus Defence and Space Ltd., Laboratoire d’analyse et d’architectures des systèmes - LAAS CNRS, Stanford University, École polytechnique fédérale de Lausanne - EPFL |
| Application Field: | Space Robotics |
| Related Projects: |
RTES-TA
Robotic technologies for the removal of space debris
(10.2012-
03.2013)
Inveritas
Innovatice technologies for relative navigation and capture
(05.2009-
03.2012)
ITN Stardust
Workpackage Close-Range Navigation and Manipulation of Space Debris and Asteroids
(02.2013-
01.2017)
Mare-IT
Information Technology for Maritime Applications
(08.2018-
11.2021)
|
| Related Robots: |
SpiderCam
SpiderCam Cable Robot
KUKA KR 60
KUKA KR 60-3 Robotic arm
|
| Related Software: |
Rock
Robot Construction Kit
MARS
Machina Arte Robotum Simulans
Phobos
An add-on for Blender allowing editing and exporting of robots for the MARS simulation
CAD-2-SIM
Computer Aided Design To Simulation
|

Project details

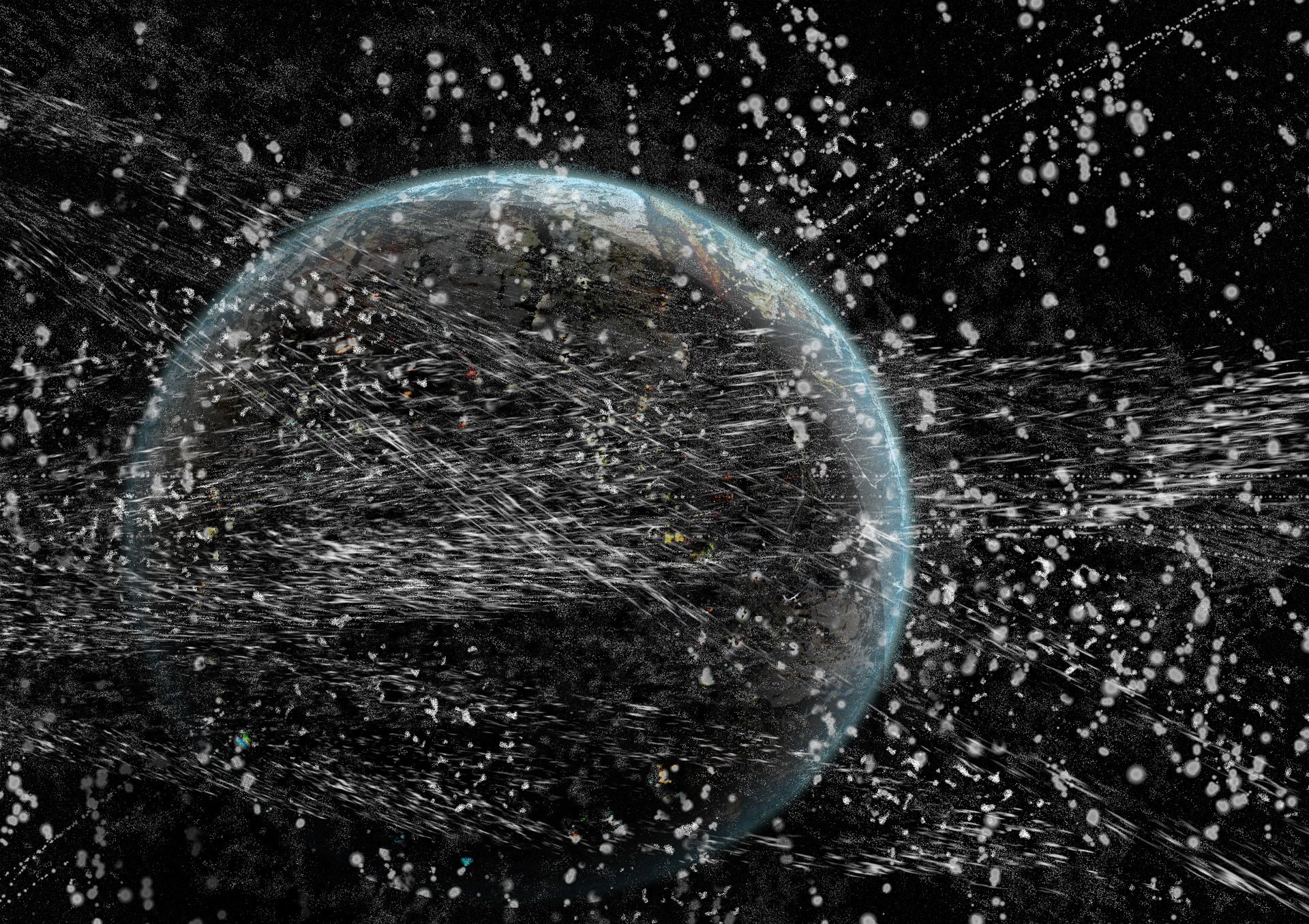
The current amount of space debris in orbit, combined with the expected increase in space traffic will have an unprecedented impact on the space environment, posing serious questions on its stability and resilience to any incident or anomalous event.
An asteroid impact, on the hand, although statistically less likely to occur, would have devastating consequences for our planet. Therefore, asteroids and space debris represent a significant hazard for both space and terrestrial assets, but they also represent one of the most interesting challenges of space science and technology.
The Stardust Reloaded (Stardust-R) project aims at tackling these challenges by capitalizing and building on the success of the previous Stardust project, an Initial Training Network, which took place from 2013 till 2017.
Stardust-R will improve the understanding of the evolution of the space environment around Earth and how the ever-increasing traffic in space can be safely managed to prevent collisions and allow a sustainable use of space. Moreover, the project will also increase our knowledge of the shape, gravity, composition and dynamics of asteroids and comets in view of possible actions to prevent a catastrophic impact with the Earth. Furthermore, the project will investigate how mineral resources on these celestial minor bodies could be exploited to enhance our exploration of the Solar System.
The project is funded by the Marie Sklodowska-Curie Actions Innovative Training Networks action of the European Union Horizion 2020 (H2020) program and comprises 20 partners, including the European, French, and German aerospace agencies that will support 15 early-stage career researchers (ESRs). The ESRs will be trained in mathematics, physics, computer science, robotics and aerospace engineering to provide effective solutions to make the space environment resilient, space exploitation sustainable, learn more about minor bodies and ultimately protect Earth and our space assets.
The part of the Stardust-R project conducted at DFKI addresses specifically the development of a real-time control system for a free-floating based manipulator, for both debris removal and on-orbit servicing, and its evaluation under realistic conditions using an underwater vehicle. Use of a manipulator-based system for such purpose presents unique challenges as high level of autonomy is required to account for the limited reaction time available to face anomalies and/or communication problems and the nonholonomic behavior of the whole spacecraft during the usage of the manipulator. In fact, the concept of an active debris removal involving orbital robotics has been around since the early 1980s, due to its similarity to on-orbit servicing. However, to date, no robotic spacecraft has ever performed a capture of a non-cooperative, tumbling object, especially in the free-floating mode.
Further information about the Stardust Reloaded project can be found at the following URL: http://www.stardust-network.eu/