MINOAS
Marine Inspection Robotic Assistant System

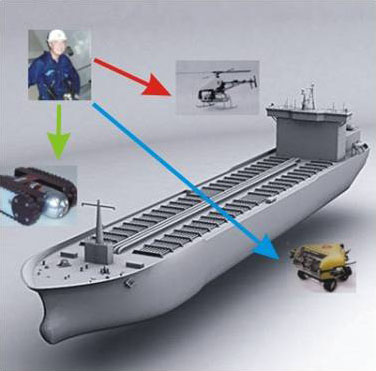
The EU-funded project MINOAS develops a new concept for the inspection of marine vessels. This concept combines state-of-the-art technologies with a standardization of the overall inspection process. In a holistic approach, MINOAS develops a new infrastructure that supports human personnel through high locomotion enabled robots equipped with high-resolution sensors. MINOAS uses crawling, climbing and flying robots to access different sections of a ship. Information gathered by the robots is integrated and presented to the human inspection staff in a central command center. The inspection process is thus made more efficient and less strenuous for human inspectors.
| Duration: | 01.06.2009 till 30.06.2012 |
| Donee: | German Research Center for Artificial Intelligence GmbH |
| Sponsor: | European Union |
| Grant number: | This work is funded by the European Commission under the project MINOAS (SCP8-GA-2009-233715) |
| Partner: | RINA, IT (coordinator); Glafcos Marine, GR; Lloyd’s Register, UK; Neorion Shipyards, GR; MTG-Dolphin Shipyards, BG; Rigel Engineering, IT; Universitat de les Illes Balears, SP; CNR-ISSIA, IT; Horama, GR |
| Application Field: | Logistics, Production and Consumer |

Project details
The heterogeneous, multi-modal MINOAS robot fleet will be able to cover most sections of a standard vessel, including both on board and overboard regions. In particular in regions that are difficult to access (e.g. in tall cargo holds or on the ship hull), the robots provide the inspectors with advanced remote perception and handling capabilities. Among others, this will reduce the need for costly supporting measures (e.g. scaffolding to access large cargo holds) and increase workplace safety for the inspectors.
By introducing robots for the inspection, multiple inspection processes can be executed in parallel. This speeds up the overall inspection process, which today often is performed on a section-by-section basis through a single inspector.
In summary, the main objectives of MINOAS are:
a.) to use robots to provide better access to those sections of a marine vessel that are difficult to reach for human inspectors (both above- and underwater),
b.) to collect, integrate, and analyze the data gathered by a multi- disciplinary robot fleet in a central command center,
c.) to record the overall inspection process for future reference and the identification of potential deficiencies.
Website: http://www.minoasproject.eu/
Videos
MINOAS: System tests in Varna

The lightweight crawler and the 3D positioning systems are tested during the ship trials in a real environment.
MINOAS: Magnet Crawler 2

Magnetic climbing robot for inspection of steel structures
MINOAS: Magnet Crawler

The Magnet Crawler robot climbs on the outer surface of the DFKI exploration hall
