Roboter lernen aus ihrer Hardware heraus ihre Fähigkeiten und im Zusammenspiel mit dem Menschen deliberatives Verhalten. In Q-Rock wird entsprechend eine bidirektionale Abbildung von Hardware und Verhalten aufgebaut. Mit Hilfe von Q-Rock kann der Nutzer eines Systems dieses über eine gewünschte Verhaltensspezifikation erzeugen.
Laufzeit:
01.08.2018
bis
31.07.2021
Zuwendungsempfänger:
Deutsches Forschungszentrum für Künstliche Intelligenz GmbH
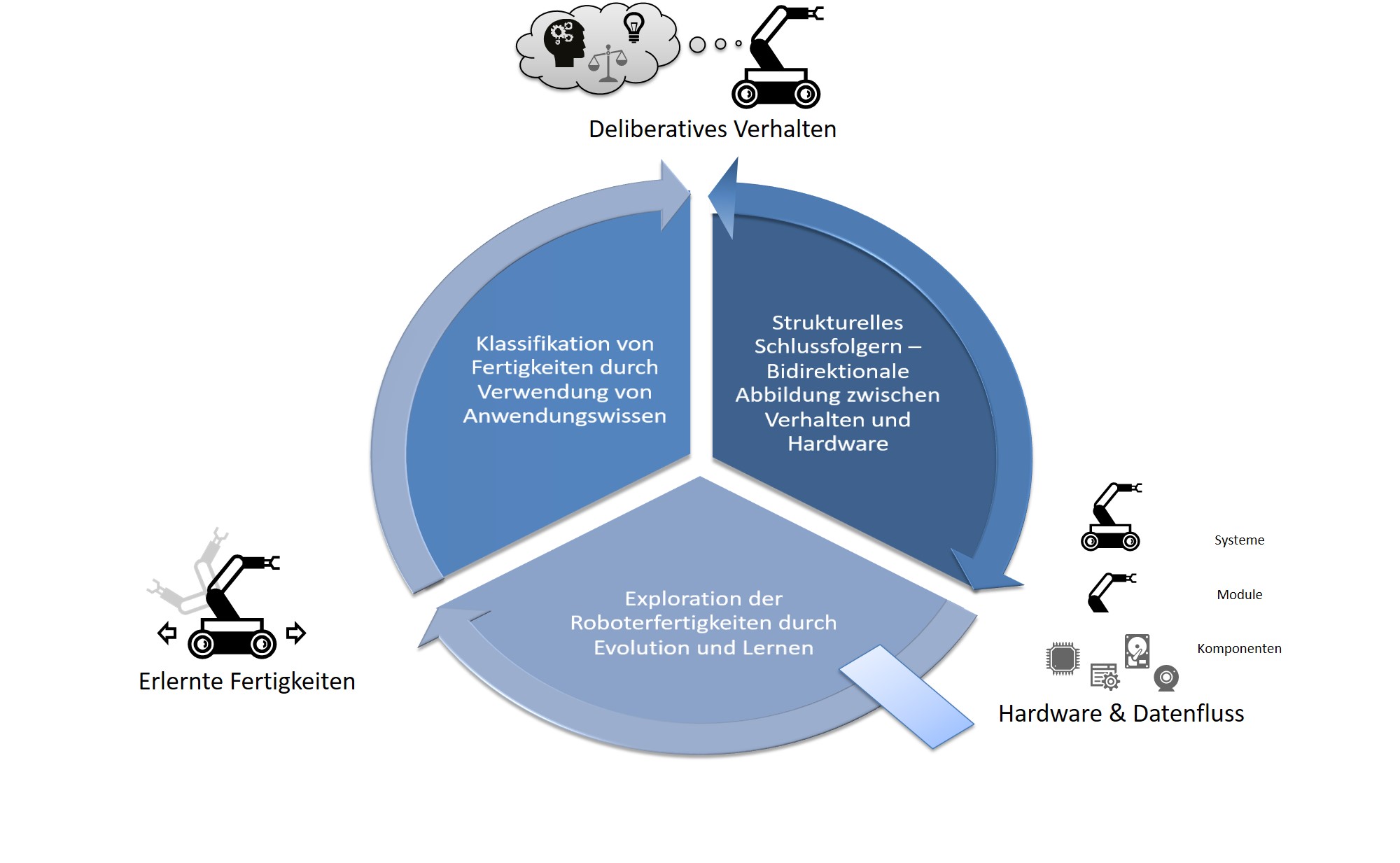
Das Ziel: Roboter lernen aus ihrer Hardware heraus ihre Fähigkeiten und im Zusammenspiel mit dem Menschen deliberatives Verhalten. In Q-Rock wird entsprechend eine bidirektionale Abbildung von Hardware und Verhalten aufgebaut. Mit Hilfe von Q-Rock kann der Nutzer eines Systems dieses über eine gewünschte Verhaltensspezifikation erzeugen.
Der Ansatz: Das Projekt Q-Rock implementiert Verfahren, die es dem Roboter erlauben ausgehend von seiner Hardwarekonfiguration die ihm zur Verfügung stehenden Fertigkeiten zu erforschen. Das Projekt Q-Rock setzt auf den Ergebnissen des D-Rock Projekts auf und benutzt die dort entstandene annotierte Hardware Datenbank. Die erlernten Fertigkeiten werden anschließend durch Verfahren des maschinellen Lernens oder durch die Anwendung von menschlichem Wissen in funktionelle Einheiten gruppiert. Zusammen mit einer semantischen Beschreibung werden daraus Cognitive Kerne, die als Bausteine für Verhalten angesehen werden können. Zur Realisierung dieser Schritte wird ein Lern-Framework konzipiert und implementiert welches evolutionäre Algorithmen, deep learning und analytische Ansätze nutzt, so dass ein Roboter seine Fertigkeiten rein auf der vorhandenen Sensorik, Aktuatorik und Software erforschen kann. Schließlich wird eine bidirektionale Abbildung zwischen Verhalten und Hardware geschaffen, indem Dialog-basierte Verfahren mit anderen Methoden zum strukturellen Schlussfolgern kombiniert werden. Durch diese Schließung des Regelkreises von der Hardware zum Verhalten kann ein Nutzer einen Roboter rein über das beabsichtigte Verhalten spezifizieren, ohne dass er ein Experte für Sensorik, Aktorik oder Software sein muss. Das Projekt wendet den Ansatz der kontinuierlichen Integration an: erst werden notwendige Schnittstellen spezifiziert, dann wird ein Gesamtsystem (mit Dummies) aufgesetzt, welches sich dann nach und nach mit den Projektergebnissen füllt.
Videos
Intrinsisches interaktives verstärkendes Lernen: Nutzung von Fehler-korrelierten Potentialen
Durch das Abspielen des Videos akzeptieren Sie die Datenschutzerklärung von YouTube.
Der Roboter lernt dank menschlichem Negativ-Feedback aus eigenem Fehlverhalten
Q-ROCK: Digital Baukasten für neues Robotik-Design aus Anwenderperspektive
Durch das Abspielen des Videos akzeptieren Sie die Datenschutzerklärung von YouTube.
Publikationen
2023
A Reference Implementation for Knowledge Assisted Robot Development for Planetary and Orbital Robotics
Mehmed Yüksel, Thomas M. Röhr, Marko Jankovic, Wiebke Brinkmann, Frank Kirchner
In Acta Astronautica, Elsevier Ltd., volume 2023, pages 1-16, 2023.
2022
Ontology-Driven Robot Design for Future Orbital and Planetary Robotics with korcut
Mehmed Yüksel, Thomas M. Röhr
European Aeronautics Science Network International Conference (EASN), Oct/2022.
Combinatorics of a Discrete Trajectory Space for Robot Motion Planning
Felix Wiebe, Shivesh Kumar, Daniel Harnack, Malte Langosz, Hendrik Wöhrle, Frank Kirchner
Editors: William Holderbaum, J. M. Selig
In 2nd IMA Conference on Mathematics of Robotics, (IMA-2022), 08.9.-10.9.2021, London, Springer International Publishing, series Springer Proceedings in Advanced Robotics, Jan/2022. ISBN: 9783030913519.
2021
A Development Cycle for Automated Self-Exploration of Robot Behaviors
Thomas M. Roehr, Daniel Harnack, Hendrik Wöhrle, Felix Wiebe, Moritz Schilling, Oscar Lima, Malte Langosz, Shivesh Kumar, Sirko Straube, Frank Kirchner
In AI Perspectives, n.n., volume 3, number 1, pages o.A., Jul/2021.
Active Exploitation of Redundancies in Reconfigurable Multi-Robot Systems
Thomas M. Roehr
In IEEE Transactions on Robotics, IEEE, volume n.n., pages 1-17, Jun/2021.
2020
Online Reconfiguration of Distributed Robot Control Systems for Modular Robot Behavior Implementation
Malte Wirkus, Sascha Arnold, Elmar Berghöfer
In Journal of Intelligent & Robotic Systems, Springer Publishing, volume 100, number 3, pages 1283-1308, Dec/2020.
A survey on modularity and distributivity in series-parallel hybrid robots
Shivesh Kumar, Hendrik Wöhrle, José de Gea Fernández, Andreas Mueller, Frank Kirchner
In Mechatronics, Elsevier Ltd., volume 68, pages 102-367, Jun/2020.
An Analytical and Modular Software Workbench for Solving Kinematics and Dynamics of Series-Parallel Hybrid Robots
Shivesh Kumar, Kai von Szadkowski, Andreas Mueller, Frank Kirchner
In Journal of Mechanisms and Robotics, ASME, volume 12, number 2, pages 1-12, Apr/2020.
BOLeRo: Behavior Optimization and Learning for Robots
Alexander Fabisch, Malte Langosz, Frank Kirchner
In International Journal of Advanced Robotic Systems, SAGE Publications, volume 17, number 3, pages n.n.-n.n., 2020.
2019
Model Simplification For Dynamic Control of Series-Parallel Hybrid Robots - A Representative Study on the Effects of Neglected Dynamics
Shivesh Kumar, Julius Martensen, Andreas Mueller, Frank Kirchner
In Proceedings in IEEE/RSJ International Conference on Intelligent Robots and Systems, (IROS-2019), 04.11.-08.11.2019, Macau, IEEE, Dec/2019.
An Analytical and Modular Software Workbench for Solving Kinematics and Dynamics of Series-Parallel Hybrid Robots
Shivesh Kumar, Andreas Mueller
In 43rd Mechanisms and Robotics Conference, Parts A and B, (IDETC/CIE-2019), 18.8.-21.8.2019, Anaheim, CA, ASME, Oct/2019.
A modular approach for kinematic and dynamic modeling of complex robotic systems using algebraic geometry
Shivesh Kumar, Andreas Müller
In Invited Talk at SIAM AG Conference, (SIAM AG-2019), 09.7.-13.7.2019, Bern, SIAM, Jul/2019.
2018
HyRoDyn: A Modular Software Framework for Solving Analytical Kinematics and Dynamics of Series-Parallel Hybrid Robots
Shivesh Kumar, Kai von Szadkowski, Andreas Müller, Frank Kirchner
In Poster at 2018 IEEE/RSJ International Conference on Intelligent Robots and Systems, (IROS-2018), 01.10.-05.10.2018, Madrid, IEEE/RSJ, series IROS Poster proceedings, pages 1-1, Oct/2018.