MaLeBeCo
Machine Learning Application Benchmarking on COTS Inference Processors

Ziel des MaLeBeCo-Projekts ist es, eine Testumgebung aufzubauen, die den Vergleich und das Benchmarking von Anwendungen des maschinellen Lernens für Low-, Mid- und High-Performance-Architekturen ermöglicht. Dies ist von besonderem Interesse, um den breiten Anwendungsbereich abzudecken, der durch die verschiedenen Einsatzszenarien und Anwendungsfälle gegeben ist. Zu diesen Anwendungsfällen gehören u.a.: die Bereitstellung vorverarbeiteter intelligenter Nutzlastdaten, Steuerung und Kontrolle (Guidance Navigation and Control, GNC) für Satelliten und Roboter, bordseitige KI für ein höheres Maß an Autonomie, intelligente Datenexplorationsalgorithmen sowie KI bei Vorgängen am Boden oder im Orbit.
| Laufzeit: | 01.10.2021 bis 30.09.2022 |
| Zuwendungsempfänger: | Deutsches Forschungszentrum für Künstliche Intelligenz GmbH |
| Fördergeber: | ESA |
| Förderkennzeichen: | ESA Contract No. 4000135724/21/NL/AS |
| Partner: |
Airbus Defence and Space |
| Anwendungsfelder: | Weltraumrobotik |
| Verwandte Projekte: |
SpaceClimber
Ein semi-autonomer freikletternder Roboter zur Untersuchung von Kraterwänden und -böden
(09.2006-
09.2009)
iStruct
Intelligente Strukturen für mobile Robotersysteme
(05.2010-
08.2013)
LIMES
Lernen intelligenter Bewegungen kinematisch komplexer Laufroboter für die Exploration im Weltraum
(05.2012-
04.2016)
TransTerrA
Semi-autonome kooperative Exploration planetarer Oberflächen mit Errichtung einer logistischen Kette sowie Betrachtung terrestrischer Anwendbarkeit einzelner Aspekte
(05.2013-
12.2017)
RIMRES
Rekonfigurierbares Integriertes Mehr-Roboter-Explorations-System
(09.2009-
12.2012)
|
| Verwandte Robotersysteme: |
MLAD
Machine Learning Accelerator Demonstrator
|
Projektdetails
Die Hauptziele der Aktivität umfassen die folgenden Aspekte:
Erstellung eines wiederverwendbaren und offenen Referenzdatensatzes:
Für diese Aktivität wurden verschiedene Anwendungsfälle vorgeschlagen, die für das Benchmarking ausgewählt und während des Projekts öffentlich zugänglich gemacht werden sollen:
1) Pose-Schätzung,
2) Anomalie-Erkennung und
3) Bildklassifizierung.
Bewertung und Auswahl von geeigneten Zielplattformen:
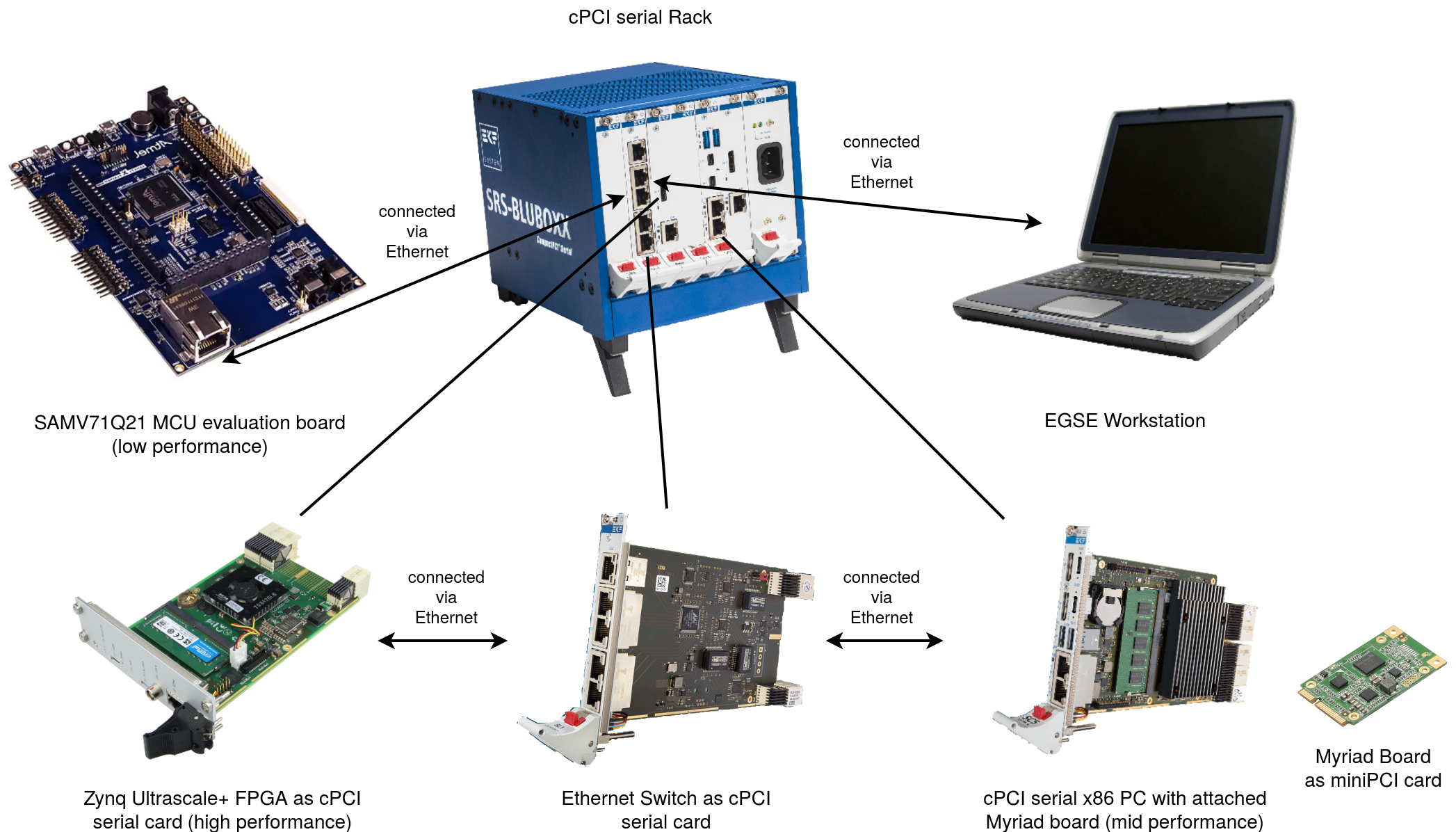
Es werden enorme Anstrengungen unternommen, um strahlungstolerante bzw. strahlungsharte Prozessoreinheiten zu bauen sowie bestimmte COTS-Prozessoren zu evaluieren, zu modifizieren und zu qualifizieren. Für die Aktivität werden drei verschiedene Prozessoreinheiten eingesetzt, die jeweils einen unterschiedlichen Leistungsbereich abdecken: Low-Performance, Mid-Performance und High-Performance. Alle vorausgewählten Prozessoreinheiten haben einen direkten Bezug zur potenziellen Anwendbarkeit in Weltraummissionen.
Entwicklung von ML-Algorithmen, die für Aufgaben repräsentativ sind, die für künftige Raumfahrtmissionen erforderlich sind:
Es wird davon ausgegangen, dass sich das Benchmarking auf repräsentative Anwendungen bezieht, die typisch für zukünftige Raumfahrtanwendungen von KI-Techniken sind. Daher ist geplant, mit einer detaillierten Analyse der Anforderungen verschiedener Raumfahrtanwendungen zu beginnen, die von hochleistungsfähigen und missionskritischen Anwendungen an Bord bis zu weniger leistungsfähigen und weniger missionskritischen Anwendungen reichen.
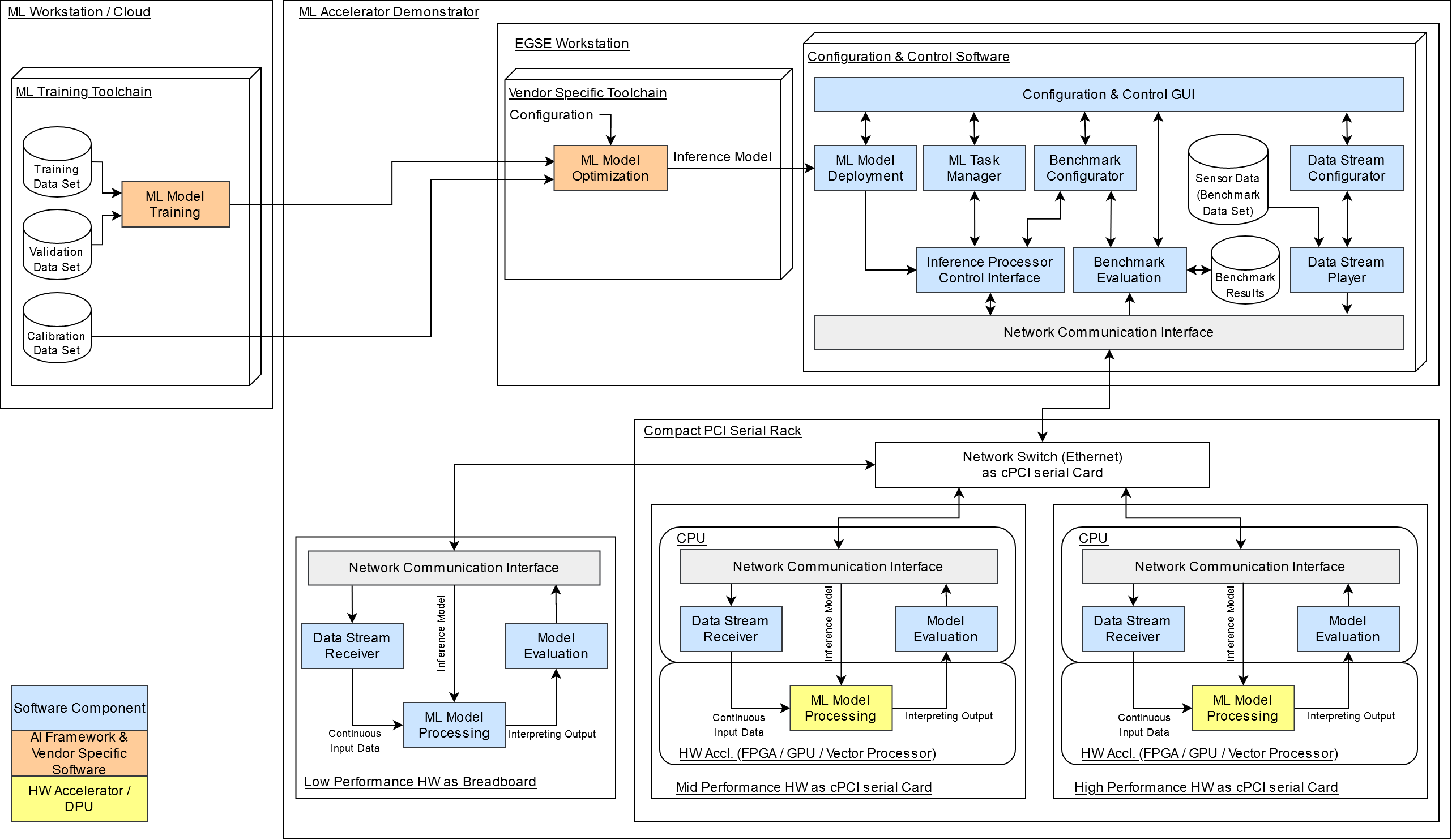
Entwicklung einer effizienten und zuverlässigen Methode zur Verwaltung von ML-Aufgaben auf der Zielplattform:
Es ist geplant, die entwickelten Inferenzmodelle auf den Zielplattformen austauschbar zu machen. Außerdem wird vorgeschlagen, die entwickelten Modelle für zukünftige Anwendungsfälle auf den Zielplattformen einzusetzen. Dieser Aufbau wird über die EGSE-GUI gesteuert, um die Benutzerfreundlichkeit und den zuverlässigen Betrieb des gesamten Task-Management- und Konfigurationsprozesses zu gewährleisten.
Entwicklung und Durchführung einer Benchmarking-Lösung für HW geeignete Zielanwendungen:
Es ist vorgesehen, eine maximale Arbeitslast für jeden Benchmark auf allen ausgewählten KI-Beschleuniger-HW-Geräten festzulegen. Die Anwendungsfälle werden so definiert, dass unterschiedliche Mengen von Operationen durchgeführt werden müssen. Es gibt zwei Arten von Metriken, die zu berücksichtigen sind. Die Metrik aus rechnerischer Sicht und die Leistungsmetrik, wie z.B. Genauigkeit und Präzision. Für jeden Benchmark wird mindestens eine Metrik spezifiziert. Diese Nachbearbeitungsfunktionen werden Teil der Definition der Benchmark-Metrik sein.
Vorbereitung eines ML-Beschleuniger-Demonstrators:
Zur Durchführung des Benchmarks wird ein ML-Beschleuniger-Demonstrator eingesetzt. Er umfasst alle vorausgewählten Hardware-Plattformen sowie eine zentrale EGSE-Workstation. Der Demonstrator wird generisch aufgebaut sein, so dass in Zukunft weitere Hardware-Plattformen und/oder Anwendungsfälle für den Benchmark hinzugefügt werden können.
Auswertung der Ergebnisse und Bereitstellung eines Standard-Inferenz-Workflows:
Der ML-Beschleuniger-Demonstrator dient als erste Initialisierung und Demonstration eines Hardware- und ML-Benchmarks für Weltraumanwendungen. Um in Zukunft weitere Anwendungsfälle und Hardware-Plattformen hinzuzufügen, wird als Ergebnis der Aktivität ein standardisierter Inferenz-Workflow evaluiert und beschrieben.