iStruct
Intelligente Strukturen für mobile Robotersysteme

Das Ziel des Projekts iStruct ist die Entwicklung eines Robotersystems sowie biologisch inspirierter Bewegungsstrukturkomponenten, die die Lokomotions- und Mobilitätseigenschaften des Roboters, auf dem sie eingesetzt werden, nachhaltig verbessern. Um dieses Ziel zu erreichen, benötigt das Gesamtsystem eine verbesserte Wahrnehmung der Umwelt und des eigenen Zustands. In Bezug auf die Erfassung und Aufbereitung von Sensordaten, der Motorkontrolle sowie der Kommunikation sind die konstruierten Strukturen so weit wie möglich in sich geschlossen. Der biologisch inspirierte Roboter ist eine ideale Testplattform für die Fuß- und Wirbelsäulen-Struktur. Diese Strukturen können die bereits bestehenden Fortbewegungsverhaltensweisen von Robotern erweitern. Zeitgleich dienen sie als tragende Strukturelemente des Roboters und als Sensoriksystem. Auf diese Weise werden verschiedene Funktionalitäten in einer Konstruktion vereint.
| Laufzeit: | 15.05.2010 bis 15.08.2013 |
| Zuwendungsempfänger: | Deutsches Forschungszentrum für Künstliche Intelligenz GmbH & Universität Bremen |
| Fördergeber: |
Bundesministerium für Wirtschaft und Technologie
Deutsches Zentrum für Luft- und Raumfahrt e.V. |
| Förderkennzeichen: | Gefördert von der Raumfahrt-Agentur des Deutschen Zentrums für Luft- und Raumfahrt e.V. (DLR) mit Mitteln des Bundesministeriums für Wirtschaft und Technologie (BMWi) aufgrund eines Beschlusses des Deutschen Bundestages. Förderkennzeichen 50RA1013 (DFKI) und 50RA1014 (Universität Bremen). |
| Partner: | Universität Bremen |
| Anwendungsfelder: | Weltraumrobotik |
| Verwandte Projekte: |
SpaceClimber
Ein semi-autonomer freikletternder Roboter zur Untersuchung von Kraterwänden und -böden
(09.2006-
09.2009)
LittleApe
(07.2008-
12.2009)
|
| Verwandte Robotersysteme: |
MLAD
Machine Learning Accelerator Demonstrator
MLAD
Machine Learning Accelerator Demonstrator
|
| Verwandte Software: |
MARS
Machina Arte Robotum Simulans
NDLCom
Node Level Data Link Communication
MARS
Machina Arte Robotum Simulans
NDLCom
Node Level Data Link Communication
|


Projektdetails


Der Schwerpunkt der Arbeiten in dem Projekt liegt auf dem Aufbau eines Roboter-Demonstrators und der Entwicklung von intelligenten Strukturen für die Anwendung in mobilen Robotersystemen, mit besonderem Fokus auf Laufrobotersystemen. Das Ziel des Projektes ist es, die Leistungsfähigkeit komplexer Laufrobotersysteme durch den gezielten Einsatz intelligenter Strukturen zu erhöhen. Um das Ziel zu erreichen, werden bestimmte starre oder verbindende Elemente zu einzelnen Subsystemen erweitert. Derartige Subsysteme bieten dem Gesamtsystem, in dem sie eingesetzt werden, einen Vorteil hinsichtlich der Mobilität und Sensorinformation. Zur Erprobung und Bewertung der intelligenten Strukturen wird ein geeigneter Roboter-Demonstrator aufgebaut werden.
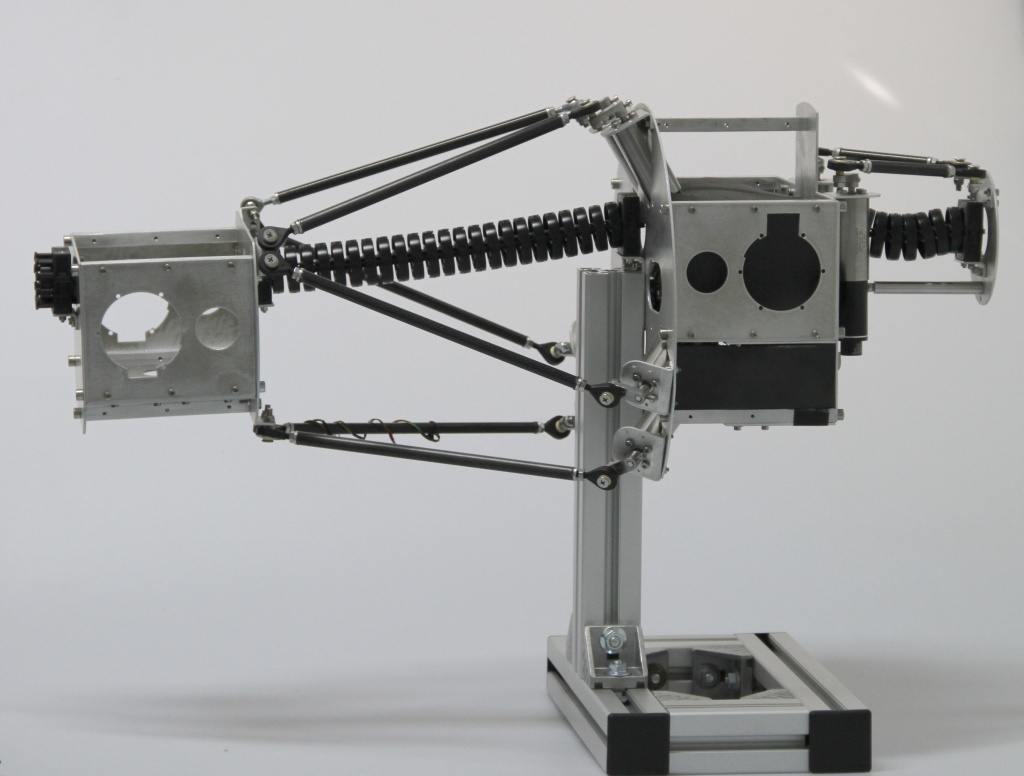
Um die Mobilität eines sogenannten „Multi-Lokomotionssystems” zu erhöhen, wird die ansonsten robotertypische starre Struktur, die Vorder- und Hinterkörper verbindet, durch eine aktuierte Wirbelsäule ersetzt (zu sehen in Abb. 1). Diese Struktur soll es dem System aufgrund des neu vorhandenen Bewegungsfreiraums ermöglichen, Bewegungssequenzen zu realisieren, die mit einem starren Körper nicht umsetzbar sind.
Im Allgemeinen kann die Wirbelsäule in einem komplexen biomechanischen System nicht als einzelne Funktionseinheit gesehen werden. Stattdessen muss das Zusammenspiel verschiedener Komponenten wie Knochen, Muskeln und Sehnen betrachtet werden. Eine Parallelkinematik hat hier optimale Eigenschaften bezüglich der Anforderungen an eine Körperstruktur für mobile Roboter. Bei bestimmten Bewegungssequenzen können hohe Kräfte auf die Wirbelsäule wirken, in welchem Fall eine in sich steife Struktur von Vorteil ist. Weiter wird die auf das System wirkende Kraft bei der aktuellen Anordnung der Stäbe (zu sehen in Abbildung 2) auf mehrere Motoren verteilt, die an einer Bewegungsgenerierung beteiligt sind. Jeder der sechs in die Wirbelsäule integrierten Antriebe besteht aus einem bürstenlosen DC Motor (BLDC) mit einem Getriebe, einem optischen Inkremental-Encoder und magnetischem Sensor zur Messung der Absolutposition.
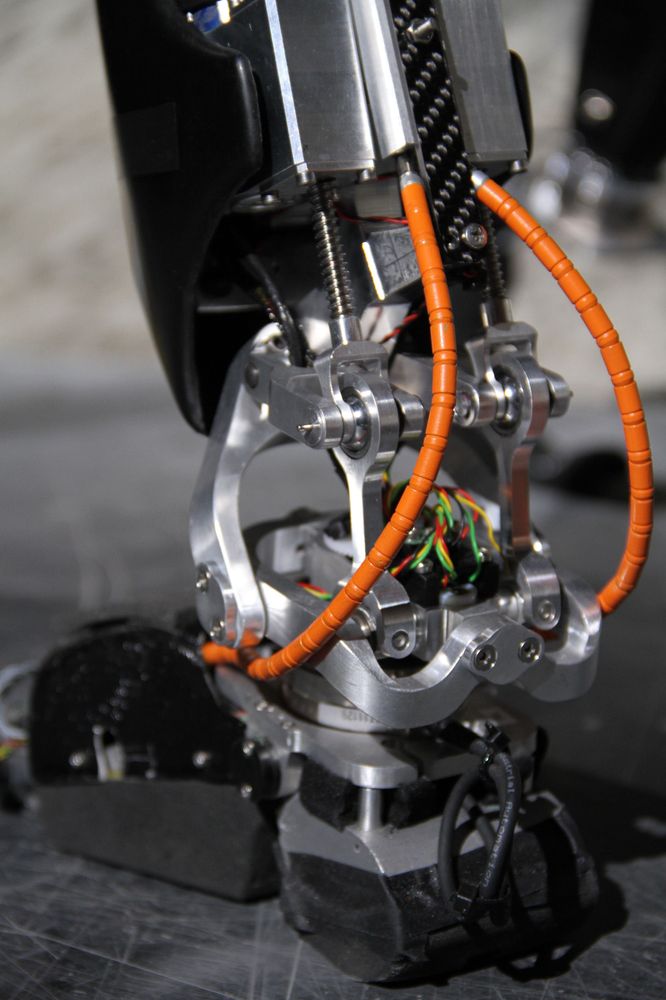
Ein weiteres intelligentes Subsystem sind die Hinterfußstrukturen des Roboters (Abbildung 3). Die meisten mehrbeinigen Roboter besitzen einfache Kugelfüße, da diese einfacher zu kontrollieren und zu entwerfen sind. Allerdings kann ein breiterer Bodenkontakt nicht nur für den Übergang zum zweibeinigen Laufen Vorteile bringen. Er sorgt zudem auch für mehr Traktion und weniger Rutschen beim vierbeinigen Laufen. Aus diesem Grund wurden für den iStruct-Demonstrator breite Kontaktfüße entwickelt, die sich mit insgesamt sieben aktiven und passiven Freiheitsgraden an den Untergrund anpassen können. Um diese hohe Flexibilität kontrollierbar zu machen, sind in den Fuß insgesamt 63 Sensoren integriert, unter anderen ein Drucksensor-Array unter dem Fuß aus 43 FSR-Sensoren, eine 6-Achs-Kraftmessdose im Sprunggelenk, ein Beschleunigungssensor im Fuß sowie magnetische und optische Encoder an jedem der vier aktiven Freiheitsgrade.
Videos
iStruct: Stand-up motion

In dem Video ist eine Transition von der vierbeinigen Grundhaltung in den bipedalen Stand zu sehen. Der dank der künstlichen Wirbelsäule neu gewonnene Bewegungsfreiraum wird aufgezeigt, während der Roboter Charlie auf zwei Beinen steht.
iStruct: Walking

Das Video zeigt den iStruct Demonstrator beim Laufen. Neben verschiedenen Laufrichtungen wurden auch fließende Bewegungen zwischen den jeweiligen Richtungen realisiert.
iStruct: Balancing

Der Roboter verschiebt seinen Schwerpunkt basierend auf der Schräglage, in der er sich befindet.