LIMES
Lernen intelligenter Bewegungen kinematisch komplexer Laufroboter für die Exploration im Weltraum


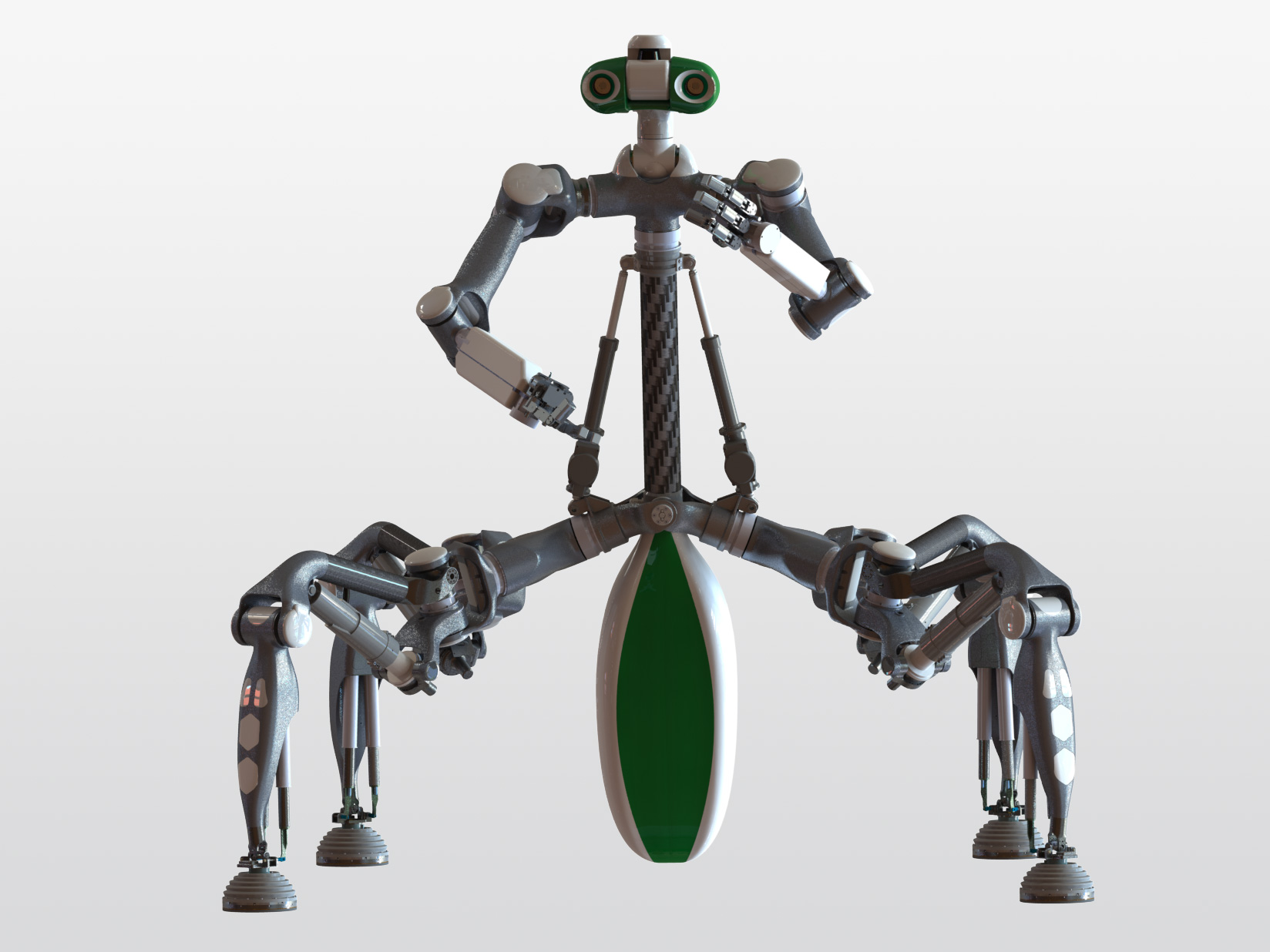
In dem Vorhaben LIMES soll ein hochmobiler mehr-gliedriger Laufroboter entwickelt werden, dessen vordere Extremitäten durch Anheben des Oberkörpers zum Zweck der Manipulation eingesetzt werden können. In zukünftigen extraterrestrischen Missionen können mit Hilfe eines derartigen Systems beispielsweise die Entnahme von Bodenproben aus schwer zugänglichem Terrain sowie der Aufbau von Infrastruktur auf unebenen und unstrukturierten Oberflächen von Himmelskörpern ermöglicht werden. Neben der mechatronischen Entwicklung des Roboters steht die Generierung und Optimierung unterschiedlicher Lokomotionsverhalten zum Überqueren diverser Umgebungsformationen und Untergründe unter Zuhilfenahme von Simulationsumgebungen und maschinellen Lernverfahren im Fokus des Projektes.


Projektdetails

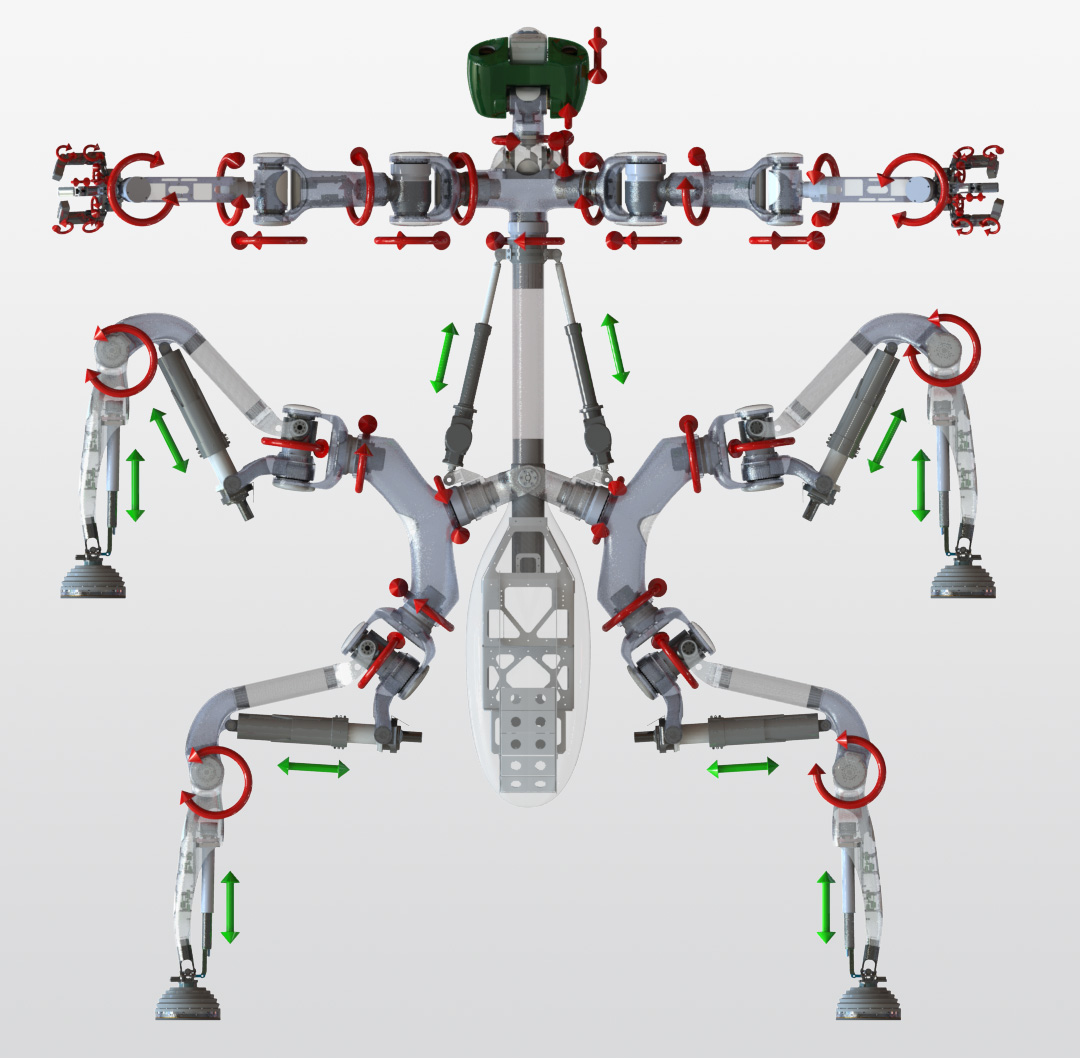
Laufroboter können aufgrund ihrer großen Anzahl an Freiheitsgraden, welche über mehrere Gliedmaßen verteilt sind, eine Vielzahl unterschiedlicher Bewegungsmuster ausführen und ihre Körperhaltung an die Umgebungsstruktur anpassen, um sich sicher und effizient auf nicht-uniformen Oberflächen fortzubewegen. Zudem bietet ihnen ihre vielfältige Sensorik die Möglichkeit, ihre Umgebung nicht nur visuell, sondern auch taktil wahrzunehmen, um z.B. Informationen über die Untergrundbeschaffenheit zu erlangen. Dieses Wissen kann wiederum dazu genutzt werden, aus einer Vielzahl vorab erlernter Laufverhalten, welche für bestimmte Umgebungsbedingungen optimiert wurden, das für die aktuelle Situation am besten geeignete auszuwählen um sich optimal fortzubewegen.
Zudem bietet der flexible Bewegungsapparat die Möglichkeit, die Beine auch zur Manipulation von Objekten einzusetzen, wenn diese mit angemessenen Greifwerkzeugen ausgestattet sind. Auch für die Bewältigung derartiger Aufgaben ist die Verfügbarkeit einer multimodalen Sensorik unbedingt erforderlich.
Im dem Vorhaben LIMES wird ein mehrgliedriger Roboter entwickelt, dessen mechatronischer Aufbau es ihm ermöglichen wird die beschriebenen Aufgaben zu bewältigen. Parallel zu der Entwicklung der realen Hardware werden präzise Simulationsmodelle der realen Subsysteme des Roboters entwickelt, um das Verhalten des Gesamtsystems möglichst genau simulieren zu können.
Das virtuelle System kann daraufhin dazu genutzt werden unterschiedliche Laufverhalten mit Hilfe von maschinellen Lernverfahren für verschiedenartige Umgebungen hinsichtlich diverser Kriterien (z.B. Energieverbrauch, Geschwindigkeit, etc.) zu Generieren und zu Optimieren.
Nachdem die Leistungsfähigkeit der Verhalten in der Simulation eine gute Qualität erreicht haben, können sie auf das reale System übertragen und im Rahmen von Experimenten weiter optimiert werden.
Die erlernten Verhalten werden abschließend in einer Verhaltensbibliothek abgelegt und können von dem Roboter in Abhängigkeit seiner aktuellen Situation für die Fortbewegung selektiert und aktiviert werden.
Auch für weitere Lernprozesse neuer Verhalten können die in der Verhaltensbibliothek abgelegten Verhalten als Ausgangsverhalten herangezogen werden.
Die Simulation bietet zudem die Möglichkeit die erlernten Verhalten zur Steuerung der Fortbewegung des Roboters unter Bedingungen geringer Gravitation, wie sie z.B. auf dem Mond herrschen, zu untersuchen und für diese Verhältnisse zu optimieren.
Videos
MANTIS: Mehrgliedriger Laufroboter für mobile Manipulation in unstrukturierten Umgebungen

Der Roboter Mantis beim Laufen mit verschiedenen Gangarten und Überwinden von Hindernissen sowie Durchführen unterschiedlicher Manipulationsaufgaben.
LIMES/MANTIS

Animation von Mantis beim Klettern in einer Kraterumgebung, um Infrastruktur zu warten.
LIMES – Learning Intelligent Motions

Animation von Mantis beim Durchführen eines Außenbordeinsatzes (EVA, Extra Vehicular Activity) außerhalb eines lunaren Habitats für Menschen.