FlatFish
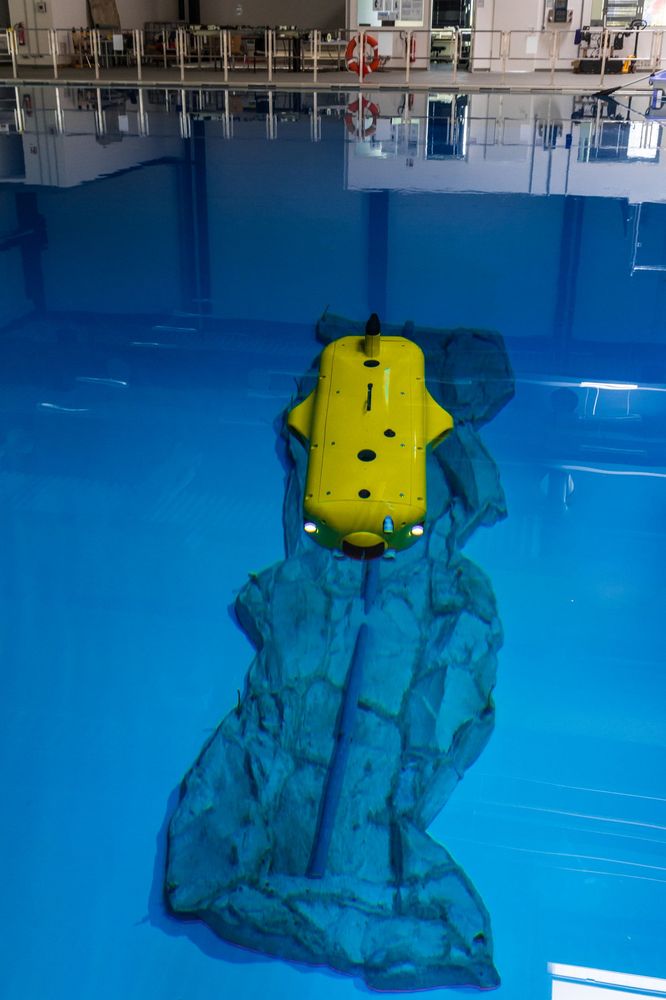
Autonomes Unterwasserfahrzeug

Das Projekt FlatFish ist ein Verbundvorhaben des DFKI mit dem Brazilian Institute of Robotics (BIR) und der Shell. Ziel ist die Entwicklung eines autonomen Unterwasserfahrzeugs (AUV) zur regelmäßigen Inspektion von Unterwasserstrukturen in Öl & Gas, wobei das AUV über längere Zeiträume im getauchten Zustand verbleibt.
| Laufzeit: | 26.11.2013 bis 30.06.2017 |
| Zuwendungsempfänger: | Deutsches Forschungszentrum für Künstliche Intelligenz GmbH |
| Fördergeber: |
EMBRAPII
anp |
| Partner: | FIEB/SENAI, Shell Brazil |
| Anwendungsfelder: | Unterwasserrobotik |
| Verwandte Projekte: |
CUSLAM
Lokalisierung und Kartenerstellung in beengten Unterwasserumgebungen
(09.2009-
07.2012)
IOP
Inspektion von Offshore-Pipelines
(12.2010-
07.2011)
EurEx
Europa-Explorer
(12.2012-
04.2016)
|
| Verwandte Robotersysteme: |
AVALON
Autonomous Vehicle for Aquatic Learning, Operation and Navigation
DAGON
Exploration AUV for long-distance-missions
DAGON
Autonomous Vehicle for Aquatic Learning, Operation and Navigation
Leng
Explorations-AUV für Langstreckenmissionen
|
Projektdetails


Um dies zu erreichen, werden verschiedene akustische und optische Sensoren eingesetzt und es wird eine Unterwasser-Docking Station entworfen. Zwei identische AUVs werden gebaut um eine parallele Softwareentwicklung in Brasilien und Deutschland zu ermöglichen.
Missionsszenario: In der Nähe einer Offshore-Installation befindet sich das Fahrzeug in der Docking Station, die mit Strom- und Datenleitungen angebunden ist. Der Nutzer erstellt (entweder vor Ort oder aus der Ferne) eine Inspektionsmission. Sofern das Zielobjekt nicht in der Nähe der Basisstation ist, folgt das AUV nach Verlassen des Docks einer Pipeline zum Zielgebiet und zeichnet dabei akustische und optische Daten von der Pipeline auf. Sobald das Zielobjekt erreicht ist, wird dessen Zustand opto-akustisch erfasst. Das AUV folgt daraufhin wieder der Pipeline und nutzt akustische und visuelle Verfahren, um an die Basisstation anzudocken. Die aufgezeichneten Daten werden hochgeladen, um automatisiert und/oder vom Nutzer verarbeitet zu werden, während gleichzeitig der Akku des AUVs geladen wird. Der Nutzer hat nun die Option, eine Folgemission zu definieren.
Der am DFKI ausgeführte Anteil des Projekts umfasst den mechanischen und elektrischen Entwurf des Fahrzeugs, aber auch die Fertigung und Integration der AUVs. Weiterhin werden grundlegende Softwaremodule am DFKI implementiert, um die Sensordatenverarbeitung, Fahrzeugsteuerung und Navigationslösungen wie z.B. Waypoint Following zu ermöglichen. High-Level-Algorithmen werden gemeinsam am DFKI in Bremen und am BIR in Salvador, Bahia entwickelt.
Zur Erprobung der breitbandigen Datenübertragung sowie der Energieübertragung im getauchten Zustand wurde der Docking-Station-Demonstrator mit einem optischen Datenübertrager sowie elektrischen Kontakten für den Ladevorgang des Fahrzeugakkus ausgestattet. Die Datenübertragung basiert auf blauen LEDs und erreichte bei den finalen Tests mit Vertretern von Shell (aus Rio (Brasilien) und Houston (USA)) sowie von SENAI-CIMATEC (aus Salvador, Brasilien) eine Transferrate von 2,8 MBit/s.
Die Energieübertragung basiert auf elektrischen Kontakten aus Titan, die durch ein Dichtungssystem vom umliegenden Salzwasser getrennt sind. Bei den Tests wurde der Ladevorgang des Akkus im getauchten Zustand mehrfach erfolgreich gezeigt.
Als Industriepartner beabsichtigt Shell, mit den Ergebnissen aus dem FlatFish-Projekt (Docking, autonome Inspektion, 3D-Rekonstruktion, opto-akustisches Homing, Unterwasser-Daten- und Energieübertragung) erste Schritte in Richtung Kommerzialisierung des FlatFish-Systems zu unternehmen.
Videos
FlatFish: Autonome SSIV Inspektion & Docking
Voll autonome FlatFish Mission: Das AUV koppelt sich ab, inspiziert sein Missionsziel (SSIV, subsea isolation valve) und kehrt zur Docking Station zurück.