Capio
Dual-Arm-Exoskelett

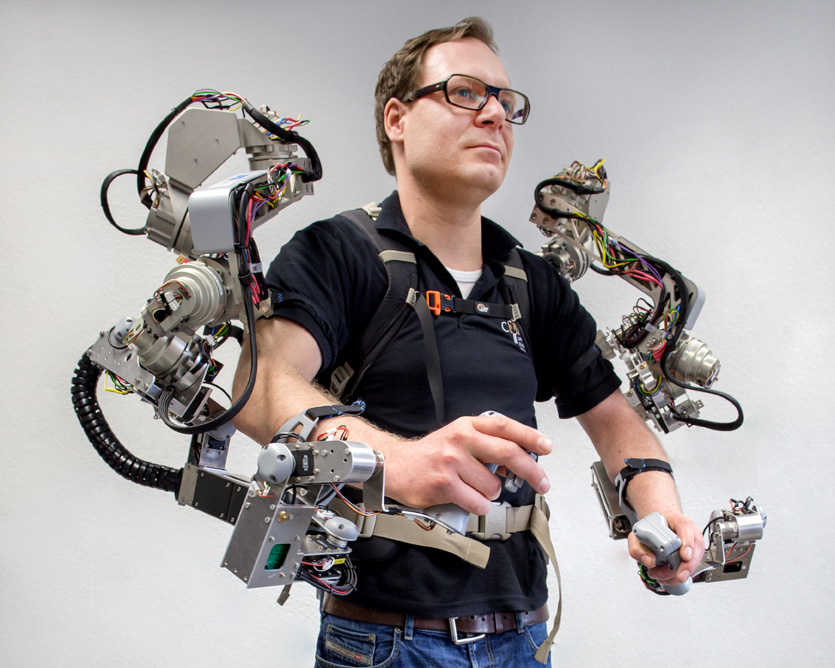
Capio entwickelt ein universell einsetzbares, tragbares und leichtes Dual-Arm-Exoskelett für den menschlichen Oberkörper. Der primäre Einsatzzweck ist die Fernsteuerung von Geräten und Robotersystemen. Eine Studie zu roboterunterstützter Rehabilitation legt die Grundlage für darüber hinausgehende Forschungsvorhaben. Durch integrierte Aktuatoren ist es möglich, Force-Feedback-Fähigkeiten zu realisieren, was grundlegend zur Weiterentwicklung virtuell-immersiver Umgebungen beiträgt.
Projektdetails
Ferngesteuerte Roboter sind unentbehrlich für den Einsatz in Umgebungen, die für Menschen gefährlich sein können. Die hierfür verwendeten Systeme wie auch deren Aufgaben haben ein hohes Maß an Komplexität erreicht, so dass es für Anwender und aktuelle KI-basierte Ansätze zur Steuerung von Robotern schwierig wird, sie zu kontrollieren.
Ein Exoskelett ist eine Mensch-Maschine-Schnittstelle (Human-Machine Interface; HMI), die es einem menschlichen Anwender ermöglicht, Robotersysteme intuitiv und realitätsnah zu bedienen. Dabei werden Bewegungen des menschlichen Körpers erfasst und auf ein Zielsystem angewandt. Wird Sensorfeedback des Zielsystems zurück zum Anwender übertragen, kann ihm der Eindruck vermittelt werden, Teil des Geschehens zu sein. Besonders interessant ist dabei die Verbindung mit robotergestützter Rehabilitation.
Auf Basis der Ergebnisse des VI-Bot-Projekts wird Capio ein universell einsetzbares, tragbares und leichtes Dual-Arm-Exoskelett für den menschlichen Oberkörper entwickeln, das zur Fernsteuerung von Geräten und Robotersystemen verwendet werden kann. Eine Studie zu roboterunterstützter Rehabilitation legt die Grundlage für darüber hinausgehende Forschungsvorhaben. Das Design des Exoskeletts profitiert von den Erkenntnissen aus VI-Bot und wird den aktuellen Stand der Technik in den Bereichen Mechatronik, Regelung und kinematischem Mapping -- also der Zuordnung der Bewegungen eines Benutzers zu den aktorischen Fähigkeiten des Zielsystems -- beitragen: Verbesserungen am Material, an der Konstruktion und im Fertigungsprozess erhöhen die Benutzerfreundlichkeit und erweitern das Anwendungsspektrum. Sensoren werden in flexible oder feste Strukturen des Exoskeletts eingebettet und die aufgezeichneten Daten in Echtzeit verarbeitet. Durch integrierte Aktuatoren ist es möglich, Force-Feedback-Fähigkeiten zu realisieren, was grundlegend zur Weiterentwicklung virtuell-immersiver Umgebungen beiträgt. Neue Ansätze der Steuerung eines solch komplexen Systems unter Berücksichtigung aller relevanten Komponenten sowie der effiziente Umgang mit der Kinematik und Dynamik sind unabdingbare, zentrale Fragestellungen in Capio.
Videos
Capio: Passives Exoskelett
Diese Demo zeigt wie die Roboterdame AILA durch das passive Exoskelett aus dem Projekt CAPIO gesteuert wird.
Capio Exoskelett
Demonstration des aktiven Capio Oberkörper-Exoskeletts für Anwendungen in der Teleoperation.