BEAR
Batterieelektrische Abfallentsorgung mit Roboterunterstützung
Batterieelektrische Fahrzeuge für den Schwerlastverkehr (EG-Fahrzeugklasse N3) besitzen das Potential, einen signifikanten Beitrag zur Reduzierung der Kohlenstoffdioxid-Emissionen sowie den gesundheitsschädlichen Feinstäuben und Stickoxiden zu leisten. Das Ziel des Projektes BEAR am DFKI ist die Entwicklung eines Robotersystems für den automatischen Tausch oder das automatische Aufladen der Fahrzeugbatterie eines batteriebetriebenen Abfallentsorgungsfahrzeuges. Darüber hinaus ist die Analyse von Sensordaten eines durch Verbrennungsmotor angetriebenen Abfallentsorgungsfahrzeuges und eines rein batterieelektrisch angetriebenen Abfallentsorgungsfahrzeuges Ziel dieses Vorhabens.
Projektdetails
Die Gesellschaft steht vor der Herausforderung die Energieversorgung und den Energieverbrauch schadstoffarmer zu gestallten. Die Dringlichkeit dieses Ziels entsteht nicht nur wegen der klimatischen Veränderungen, die durch den Ausstoß von CO² verursacht werden, sondern auch auf Grund der starken Luftverschmutzung durch Feinstäube und Stickoxide in Ballungsräumen.
Etwa 14.000 Müllsammelfahrzeuge werden täglich in Deutschland, meist in den dicht besiedelten Gebieten, also innerstädtischen Gebieten und den zugehörigen Wohngebieten, eingesetzt. Jedes dieser Fahrzeuge verbraucht durchschnittlich etwa 80 Liter Diesel pro Tag, davon etwa die Hälfte für das Fahren des Fahrzeugs, die andere Hälfte für das Sammeln und Verdichten des Abfalls. Dieser Verbrauch summiert sich insgesamt auf ca. 280 Millionen Liter Diesel pro Jahr oder CO2-Emissionen von rd. 736.000 Mg pro Jahr.
Das Projekt "BEAR" befasst sich mit der Entwicklung und Realisierung eines ganzheitlichen Konzeptes für den Einsatz rein elektrischer Müllsammelfahrzeuge. Der Projektpartner FAUN entwickelt ein rein elektrisches Müllsammelfahrzeug auf Basis einer existierenden Plattform, ergänzend dazu entwickelt das DFKI ein Robotersystem, mit dem die im Fahrzeug installierten Batterien entweder automatisch mit dem Ladesystem verbunden werden oder ausgetauscht werden können. Der Projektpartner BEG testet die Fahrzeuge sowie das robotische Ladesystem im Alltagsbetrieb.
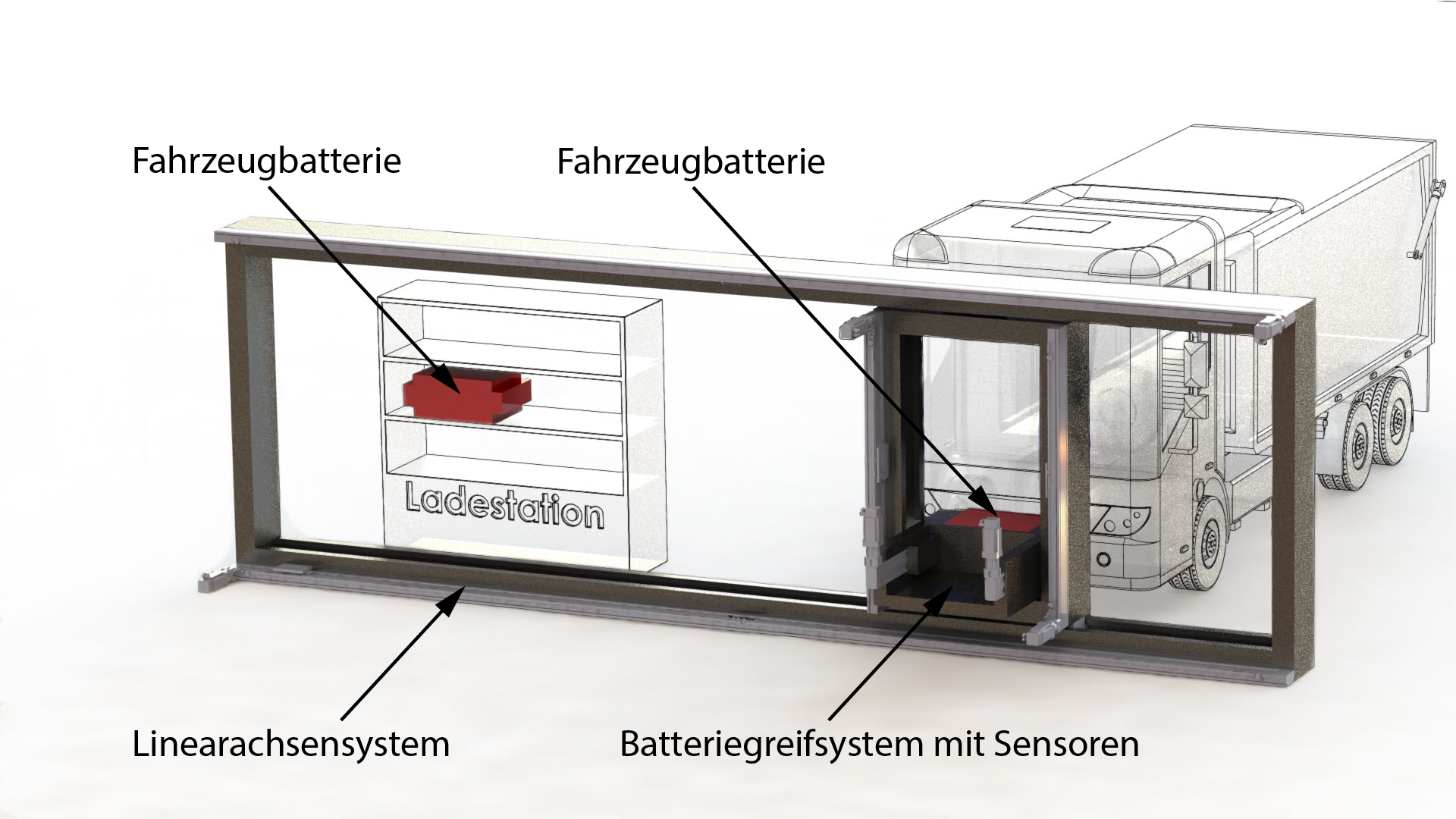
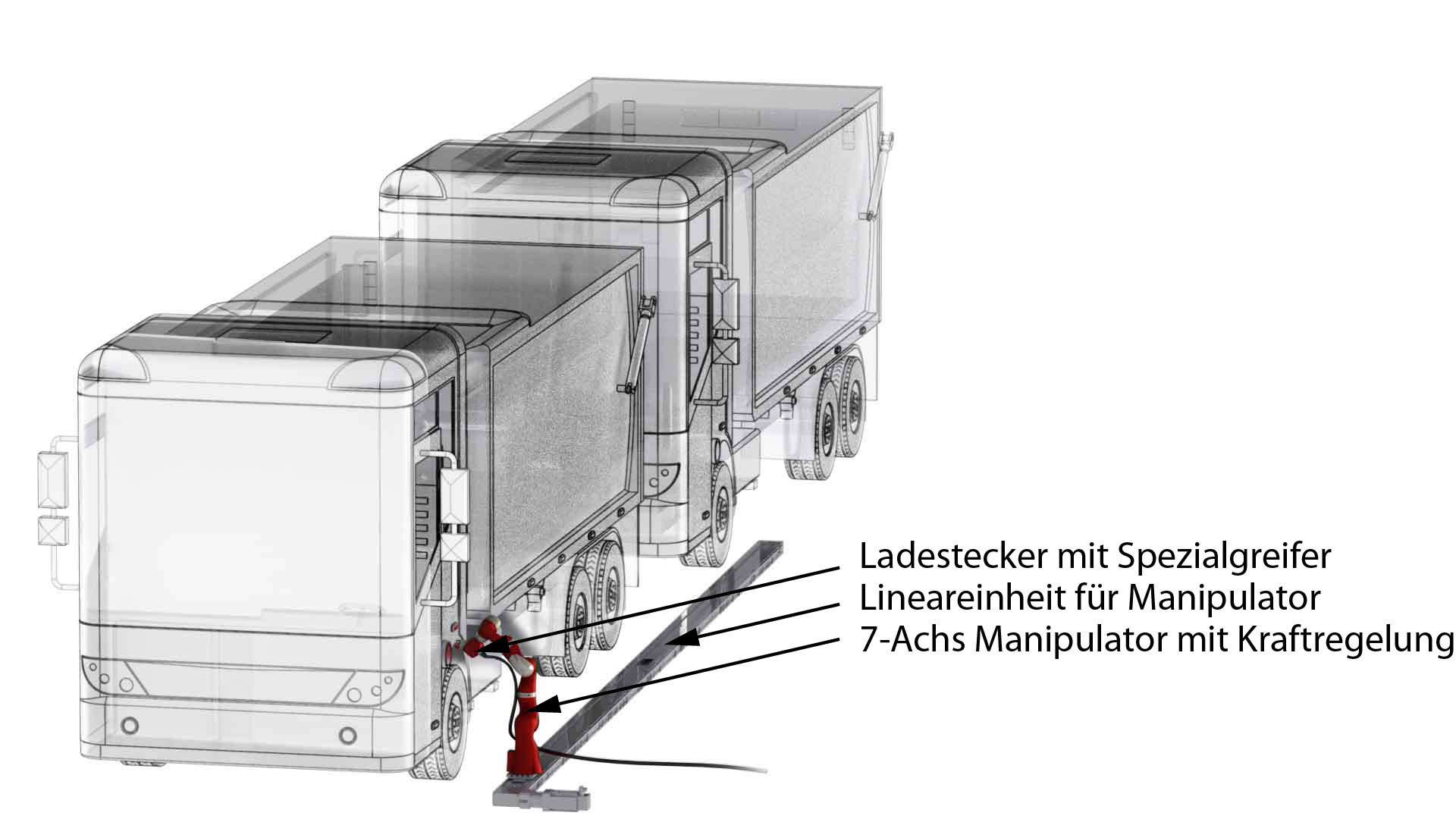
Die Entscheidung über die zu realisierende Lösung des Ladekonzeptes wird nach einer Analyse von existierenden Fahrprofilen aus dem realen Einsatz eines Müllfahrzeugs von BEG getroffen. Es soll entweder ein Robotersystem entwickelt und konstruiert werden, das es ermöglicht, die Batterien ohne Eingriff des Fahrers/Bedieners zu tauschen. Das zu entwickelnde Batterieaustauschsystem (siehe Abb. 1) dient dann dazu, die Batterie aus einer bereits vom Fahrzeug geöffneten Wartungsöffnung zu entnehmen und durch eine aufgeladene Batterie von der Ladestation zu ersetzen. Sollte die Auswertung der Fahrprofile jedoch die Aufladung der Batterie im Fahrzeug als bevorzugte Variante identifizieren, wird ein handelsüblicher Roboterarm für die Handhabung der Ladeeinheit angepasst, um ein autonomes Ladesystem zu realisieren (siehe Abb. 2). Die autonome Aufladung des Sammelfahrzeugs erfordert eine sensorische Erfassung der Situation, weswegen der Laderoboter je nach zu entwickelndem Gesamtkonzept mit entsprechenden Sensoren ausgerüstet wird.
Darüber hinaus werden im Rahmen des Projekts relevante Lastprofile aus verfügbaren Massendaten herausgearbeitet. Diese Daten werden während des Betriebs bereits vorhandener konventioneller Müllsammelfahrzeuge gewonnen. Ziel ist es festzustellen, ob und welche typischen Belastungsprofile in den Daten der Touren der ASF (Abfallsammelfahrzeuge) zu finden sind. Die typischen Profile können dann vom Fahrzeugentwickler FAUN genutzt werden, um Konzepte zu entwickeln und die Dimensionierung von Batterien und Antriebssystemen für die gängigsten Profile zu definieren. Zur Realisierung dieses Ziels sollen Methoden des maschinellen Lernens (ML) eingesetzt werden. ML-Frameworks und open source Softwarebibliotheken sind hierfür geläufige Methoden, die innerhalb des Projektes zum Einsatz kommen werden.