Scarabaeus

Technical Details
| Size: | 80 x 148 x 18 (LxBxH in cm) |
| Weight: | ~33,5 kg |
| Power supply: |
28,8V NiMH with 9Ah
|
| Actuation/ Engine: |
Nominal 13Mm, 26Nm in peaks
|
| Sensors: |
camera,
gyroscope,
pitch/roll,
joint current and angle,
laser scanner,
foot pressure
|
Organisational Details |
|
| Application Field: | Space Robotics |
| This system is not actively used anymore. | |
System description

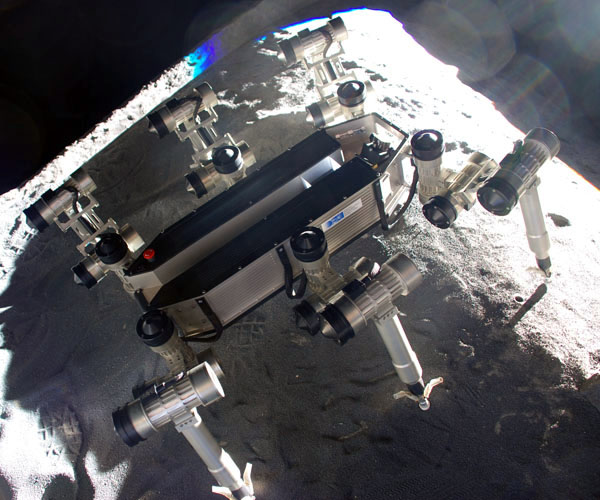
The goal of the robot is to develop and to program a multifunctional, multi-degree of freedom, autonomous walking-robot for rough, steep, and uneven terrain, e.g., canyon or crater walls.
One focus is the development of high-level artificial intelligence which allows the SCARABAEUS to detect obstacles and to navigate around them, especially in rocky slopes with up to 80% inclination. Due to the extreme environment, most planning and navigation solutions were not applicable. In natural environments, self-localization and path planning are much more challenging than indoors, e.g. offices with flat floor and structured surroundings. The developed methods will be further improved within the SPACECLIMBER project.
The SCARABAEUS was built based on the experience gained in the experiments from the SCORPION and ARAMIES projects. The SCARABAEUS joints were developed in the ARAMIES project, featuring an continuous torque of 13 Nm (26 in peaks). They are controlled by 4 different board types similar to those used to control the ARAMIES robot.
The low-level software is based on bio-inspired locomotion control concepts. It features Bezier Curve-based rhythmic trajectories whose output is similar to the output of Central Pattern Generators (CPG). Additional reflex models ensure robust locomotion in hazardous terrain. The rhythmic patterns may directly define joint angles as well as Cartesian coordinates for the foot using an inverse kinematics layer developed for SCARABAEUS. The bio-inspired mechanisms are capable of controlling 18 joints and 6 claws with a Microcontroller (Motorola MPC565 at 40MHz).
The claws, which are attached to the feet, were designed to perform two functions:
- To enlarge the contact area to the ground by spreading the claws in order to avoid sinking into dusty surfaces.
- Enabling the legs to be used as manipulators because they innately have a large operating space.
Using piezo-electric load cells attached to the claws, it is possible to detect contact forces. This data allows us to detect whether an object was successfully grabbed or was lost during an manipulation task. Also, the surface can be investigated when the claw is spread to prevent sinking.
The software is implemented on the basis of a real-time microkernel (M.O.N.S.T.E.R), which was specifically built by the DFKI for behavior-based programming and features robust (quasi-) parallel process execution and very low system overhead executed on the MPC565. This microkernel is used in a wide range of our robots and was also ported back to the SCORPION robot. This allows us to easily exchange behaviors and new features between our walking robots. For example, the inverse kinematics developed for the SCARABAEUS could be used by the SCORPION solely by setting the correct segment lengths.
Videos
Space exploration with legged robots

A robot team (Manipulatorar mounted on a lander, a rover and a walking robot) tested in a landscape, modeled on the lunar surface