Scarabaeus

Technische Details
| Größe: | 80 x 148 x 18 (LxBxH in cm) |
| Gewicht: | ~33,5 kg |
| Stromversorgung: |
28,8V NiMH mit 9Ah
|
| Antrieb/ Motoren: |
Norm. 13Nm Spitzen 26Nm
|
| Sensoren: |
Kamera,
Gyroskop,
Neigung,
Gelenkstrommessung,
Gelenkwinkelgeber,
Laserscanner,
Fußdrucksensoren
|
Organisatorische Details |
|
| Anwendungsfelder: | Weltraumrobotik |
| Verwandte Projekte: |
SpaceClimber
A Semi-Autonomous Free-Climbing Robot for the Exploration of Crater Walls and Bottoms
(09.2006- 09.2009)
SpaceClimber
Ein semi-autonomer freikletternder Roboter zur Untersuchung von Kraterwänden und -böden
(09.2006- 09.2009)
|
| Dieses System ist nicht mehr aktiv im Einsatz. | |
Systembeschreibung

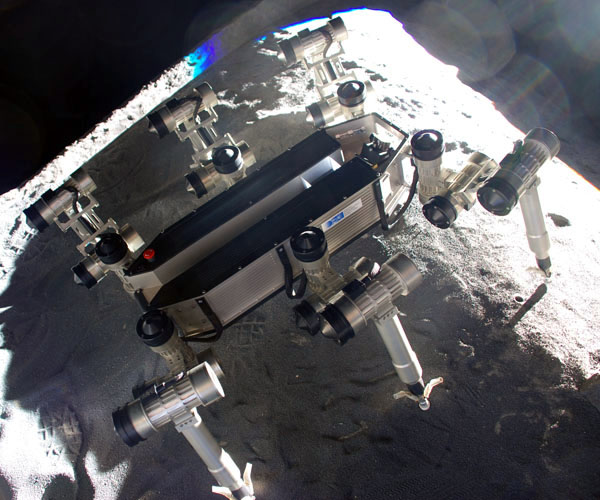
Das Ziel des Roboters ist es, einen vielseitigen, autonomen Laufroboter zu entwickeln und zu programmieren, der über eine große Anzahl von Freiheitsgraden verfügt und in der Lage ist, sich auf unwegsamem und steilen Gelände fortzubewegen, z.B. auf Abhängen oder Kraterwänden.
Im Mittelpunkt steht u.a. die Entwicklung höherer künstlicher Intelligenz, die den SCARABAEUS in die Lage versetzen soll, Hindernisse zu erkennen und diese zu umgehen, besonders auf felsigen Abhängen mit einer Neigung von bis zu 80 %. Aufgrund der extremen Umgebungsbedingungen sind die meisten Lösungen zur Planung und Navigation nicht anwendbar, da in natürlichen Umgebungen Selbstlokalisierung und Wegplanung eine weit größere Herausforderung darstellen als in Innenbereichen, wie z.B. in Büros mit ebenen Fußböden oder in Gebäuden. Die entwickelten Methoden sollen im SPACECLIMBER-Projekt weiter verfeinert werden.
Auf der Grundlage der Erfahrungen, die in den SCORPION- und ARAMIES- Projekten gemacht wurden, entstand der SCARABAEUS. Seine Gelenke wurden innerhalb des ARAMIES-Projektes entwickelt und zeichnen sich durch ein Drehmoment von 13 Mn (26 Nm in Spitzen) aus. Sie werden durch vier unterschiedliche Platinentypen gesteuert, welche denen der ARAMIES-Robotersteuerung ähneln.
Die „low-level“ Software basiert auf bio-inspirierten Konzepten zur Fortbewegungssteuerung und weist rhythmische Bewegungsmuster auf, die auf Bezier-Kurven basieren und deren Ausgaben denen von Central Pattern Generatoren (CPG) ähneln. Zusätzliche Reflexmodelle sorgen für eine stabile, sichere Fortbewegung auf gefährlichem Gelände. Diese rhythmischen Muster können sowohl Gelenkwinkel als auch Cartesische Koordinaten direkt für den Fuß bestimmen, indem sie eine Schicht nutzen, welche die inverse Kinematik für den SCARABAEUS berechnet. Die bio-inspirierten Mechanismen sind in der Lage, mit Hilfe eines Microcontrollers (Motorola MPC565 bei 40MHz) 18 Gelenke und sechs Greifer zu steuern.
Die Greifer, die an den Füßen angebracht sind, sollen zwei Funktionen erfüllen:
- Die Kontaktfläche mit dem Boden zu vergrößern, indem die Greifer gespreizt werden und dadurch ein Versinken in staubigem Untergrund verhindert wird.
- Die Beine sollen als Manipulatoren benutzt werden können, da diese von Natur aus einen großen Spielraum haben.
Die Kraft-Mess-Sensoren auf piezo-elektrischer Basis, welche an den Greifern angebracht sind, ermöglichen das Erkennen von Greifkräften. Anhand dieser Daten kann dann festgestellt werden, ob ein Objekt erfolgreich gegriffen wurde oder ob es während einer Manipulationsaufgabe verloren ging. Ebenso kann der Untergrund untersucht werden, wenn der Greifer gespreizt wird, um ein Einsinken zu vermeiden.
Die Software wird auf der Basis eines echtzeitfähigen Mikrokernels implementiert (M.O.N.S.T.E.R), der vom DFKI speziell für verhaltensbasiertes Programmieren entwickelt wurde und, ausgeführt auf dem MPC565, robuste, quasi-parallele Prozessausführung und einen sehr niedrigen Overhead, aufweist. Dieser Mikrokernel wurde in einer großen Anzahl unserer Roboter benutzt und wurde ebenfalls auf den SCORPION Roboter portiert. Dadurch ist es einfach, zwischen unseren Laufrobotern Verhalten und neue Eigenschaften auszutauschen. So zum Beispiel könnte die inverse Kinematik, die für den SCARABAEUS entwickelt wurde, ebenso vom SCORPION benutzt werden, indem die Parameter einfach nur die korrekte Länge der Beine angepasst werden.
Videos
Weltraumexploration mit beingetriebenen Robotern

In einer, der Mondoberfläche nachempfundenen, Landschaft soll ein Roboterteam getestet werden