Magnet Crawler II
Inspection Robot for Enhanced Ship Safety

Contact person:
Technical Details
| Size: | 330 x 300 x 130 mm |
| Weight: | 1230 g |
| Power supply: |
11.1V – 800mAh Lithium-Polymer-Battery (operating time about 30 min.)
|
| Actuation/ Engine: |
2 X 12V DC gear motors with encoders
|
| Sensors: |
3-axis acceleration sensor
|
Organisational Details |
|
| Application Field: | Logistics, Production and Consumer |
| Related Projects: |
INCASS
Inspection Capabilities for Enhanced Ship Safety
(11.2013- 04.2017)
|
| Related Robots: |
Magnet Crawler
Marine Inspection Robotic Assistant System
|
System description
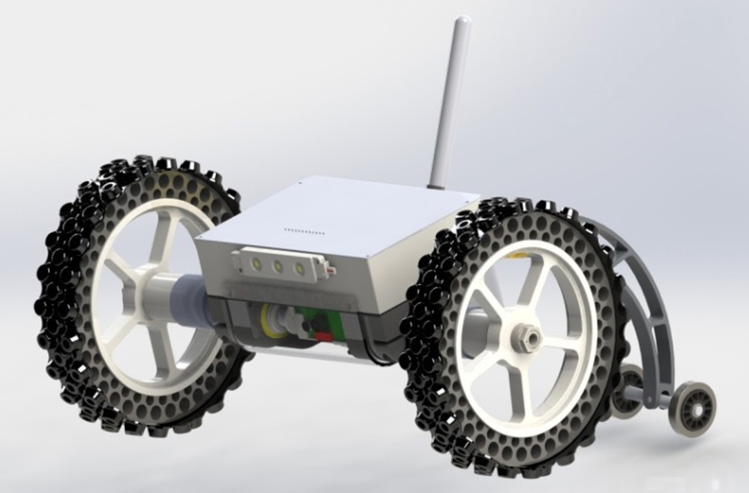

The Magnet-Crawler II is a lightweight, compact climbing-robot for magnetic surfaces. The robot uses two gear motors to drive its magnetic tweels and uses an elastic tail to improve its stability. In the front part of the robot an Odroid embedded system is integrated with a tiltable 720p cam, an I/O-Board, two LED spotlights and one LED tracking light. The Magnet-Crawler II is powered by lithium-polymer batteries and is controlled via WLAN. The video signal of the robot is displayed at the control-terminal of the robot. The robot shall be used for the inspection of ship hulls.