Magnet Crawler II
Inspektionsroboter für erweiterte Schiffssicherheit

Ansprechpartner/in:
Technische Details
| Größe: | 330 x 300 x 130 mm |
| Gewicht: | 1230 g |
| Stromversorgung: |
11.1 V – 800 mAh Lithium-Polymer-Akku (Laufzeit ca. 30 Minuten)
|
| Antrieb/ Motoren: |
2 X 12V DC Getriebemotor mit Encodern
|
| Sensoren: |
3 Achsen Beschleunigungssensor
|
Organisatorische Details |
|
| Anwendungsfelder: | Logistik, Produktion und Consumer |
| Verwandte Projekte: |
INCASS
Inspection Capabilities for Enhanced Ship Safety
(11.2013- 04.2017)
|
| Verwandte Robotersysteme: |
Magnet Crawler
Marine Inspection Robotic Assistant System
|
Systembeschreibung
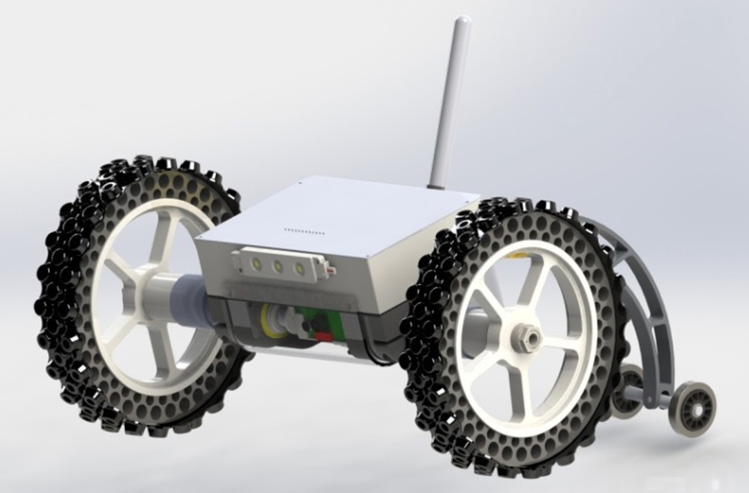

Der Magnet Crawler II ist ein leichter und kompakter Kletterroboter für magnetische Oberflächen. Der Roboter besitzt zwei durch Getriebemotoren angetriebene Magnet-Tweels und einen elastischen Schwanz zur Verbesserung der Stabilität. Im vorderen Teil des Roboters befindet sich eine kippbare 720p-Kamera, ein Odroid Embedded System, ein I/O Board, zwei LED Scheinwerfer und eine Tracking-LED. Der Magnet Crawler wird durch Lithium-Polymer-Akkus versorgt und über WLAN gesteuert. Das Videosignal der Kamera wird dem Bediener auf der Steuerkonsole angezeigt. Der Roboter soll zur Inspektion von Schiffswänden eingesetzt werden.