LittleApe

Technical Details
| Size: | 358mm x 288mm x 320mm |
| Weight: | 2,2kg |
| Power supply: |
18.5V
|
| Actuation/ Engine: |
Dynamixel servo motors
|
| Sensors: |
IC-Haus, IMU
|
Organisational Details |
|
| Application Field: | Assistance- and Rehabilitation Systems |
| Related Projects: |
LittleApe
(07.2008- 12.2009)
|
| This system is not actively used anymore. | |
System description
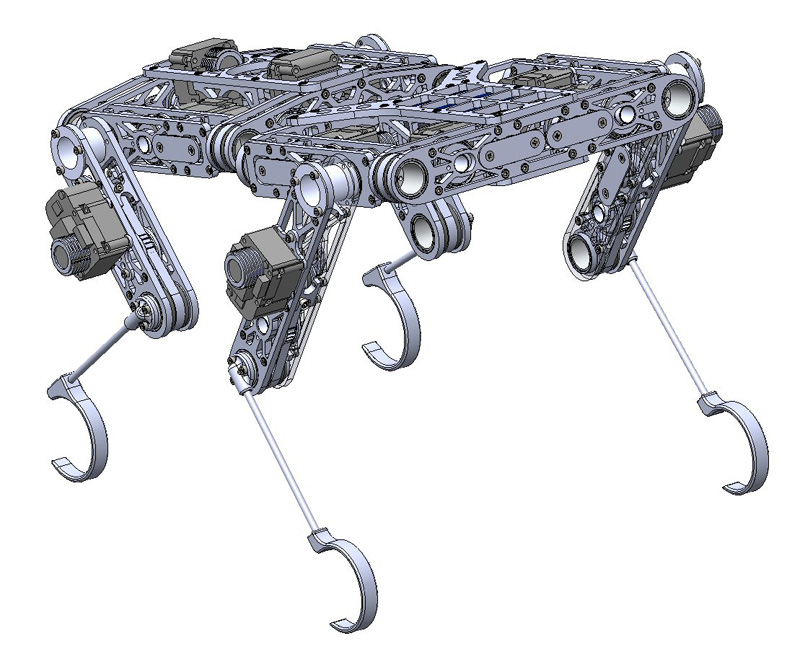
In the LittleApe project, a four-legged, ape-like robot will be designed and programmed. While many robots have a symmetrical structure, LittleApe will feature the proportions corresponding to its biological archetype. The most promising species for our requirements like climbing and walking on four and two legs are the chimpanzee (Pan troglodytes) and its close relative, the bonobo (Pan paniscus).
Particular attention is paid to the weight of the robot in order to realize the planed movements like climbing with the selected servo motors. The lightweight robot will be used to study various aspects of the morphology and locomotion.
A timing belt transmission is used to connect the actuator to the joints of the robot. The front and hind body is connected via a passive spine-like element. The foot that was developed for LittleApe absorbs shocks and features a hook-like shape for climbing. Different sensors were tested to detect the touchdown or to measure the deflection of the foot.
A Gumstix microcomputer with an extremely small form factor featuring an ARM-architecture running at 624Mhz and a Linux operating system is used. Running a linux system enables the execution of the MONSTER microkernel designed for the ODE simulation on the Gumstix system.
LittleApe uses 12 absolute angular encoders, one attached to every joint axis. Using these sensors, the robot is able to measure its current pose with high accuracy.
A simulation model was developed and adapted to the real system regarding the dimensions and the mass distribution. A locomotion pattern of a Bonobo (Pan paniscus) was extracted from motion data and applied on the simulation model of LittleApe. The robot showed dynamically stable gaits characterized by an unloading of the forelimbs which is typical for primate locomotion.
LittleApe has currently a weight of 2.2kg and has the dimensions of 358mm x 288mm x 320mm (length x width x height). Equipped with a rechargeable battery pack (18.5V / 0.9Ah) LittleApe can walk for 15 to 20 minutes.
Videos
Little Ape

Integration of a spine