LittleApe

Technische Details
| Größe: | 358mm x 288mm x 320mm |
| Gewicht: | 2,2kg |
| Stromversorgung: |
18.5V
|
| Antrieb/ Motoren: |
Dynamixel ServoMotoren
|
| Sensoren: |
IC-Haus, IMU
|
Organisatorische Details |
|
| Anwendungsfelder: | Assistenz- und Rehabilitationssysteme |
| Verwandte Projekte: |
LittleApe
(07.2008- 12.2009)
LittleApe
(07.2008- 12.2009)
|
| Dieses System ist nicht mehr aktiv im Einsatz. | |
Systembeschreibung
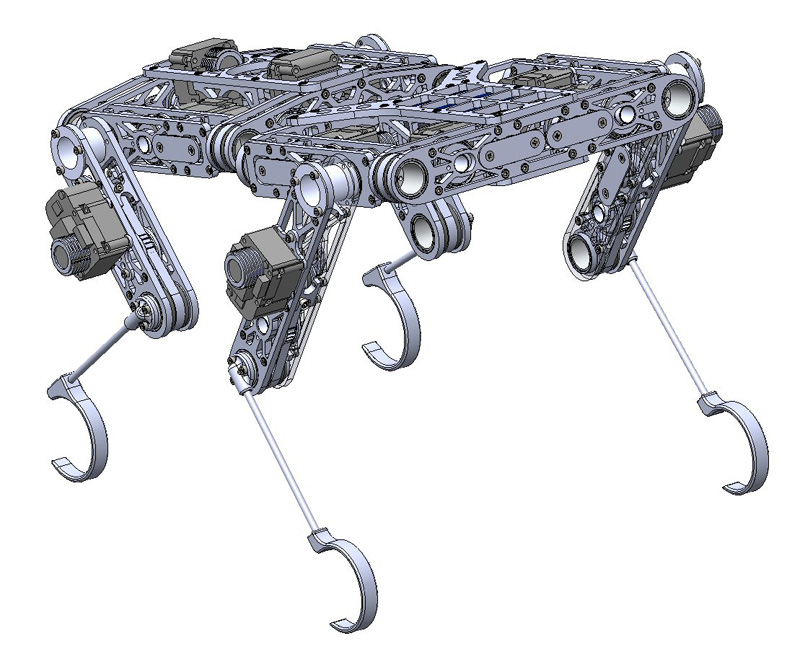
Im Projekt LittleApe wird ein vierbeiniger, affenähnlicher Roboter konstruiert, gebaut und programmiert. Während viele Roboter einen symmetrischen Aufbau haben, wird bei LittleApe darauf geachtet, dass die Proportionen denen des biologischen Vorbilds entsprechen. Die vielversprechendsten Spezies für die Anforderungen, wie Klettern oder Laufen auf zwei und vier Beinen, sind der Schimpanse (Pan troglodytes) und sein naher Verwandter, der Bonobo (Pan paniscus).
Besonderes Augenmerk wird auf das Gewicht des Roboters gelegt, um eine Umsetzung der Bewegungsmuster mit den verwendeten Servomotoren realisieren zu können. Der Leichtbau-Roboter dient der Studie verschiedener Fragestellungen bezüglich Morphologie und Lokomotion.
Mit den Zahnriemen werden die Servomotoren und damit auch ein großer Teil des Gewichts nach oben verlagert. Durch die Gewichtsverschiebung Richtung Schulter kann das Trägheitsmoment des Beins erheblich reduziert werden. Die Füße und Hände sind, wie beim biologischen Vorbild auch, unterschiedlich gestaltet. Besonderes Augenmerk soll auf eine geeignete Nachgiebigkeit und Dämpfung gelegt werden.
Ein 624Mhz Gumstix Mikrocomputer mit einem extrem kleinen Formfaktor und ein Linux Betriebssystem wird für LittleApe verwendet. Die Verwendung eines Linuxsystems vereinfacht es, den hauseigenen Microkernel MONSTER auszuführen.
LittleApe benutzt 12 absolute Winkelencoder, die jeweils an den aktiven Gelenken angebracht sind. Unter Verwendung dieser Sensoren ist der Roboter in der Lage, seine gegenwärtige Haltung mit hoher Genauigkeit zu messen.
Ein Simulationsmodell wurde dem realen System hinsichtlich der Abmessungen und Massen nachgebildet. Das Bewegungsmuster eines Bonobos wurde von den Bewegungsdaten extrahiert und auf dem Simulationsmodell von LittleApe angewendet. Der Roboter zeigte dynamisch stabile Bewegungen, die durch eine Entlastung der Vorderbeine gekennzeichnet wurden, welches für Primatenbewegung typisch ist.
LittleApe hat ein Gewicht von 2.2kg und misst 358mm x 288mm x 320mm (Länge x Breite x Höhe). Ausgerüstet mit einem Lithium Polymer Akku (18.5V / 0.9Ah) kann LittleApe 15 bis 20 Minuten laufen.
Videos
Little Ape

Integration einer Wirbelsäule