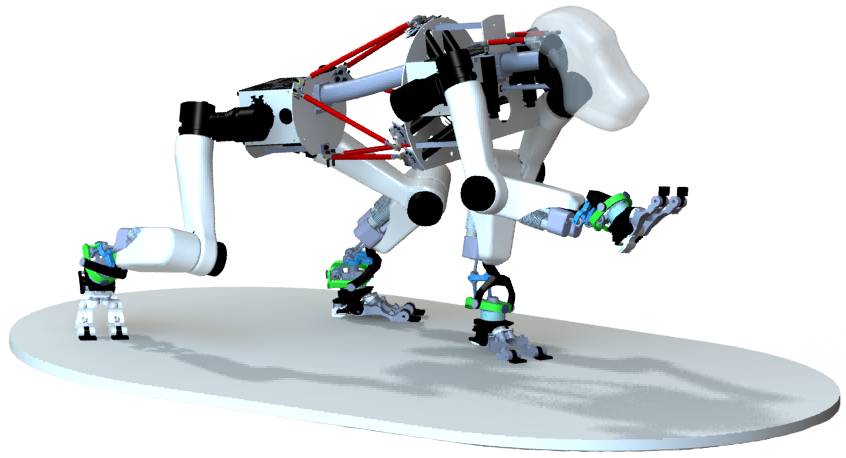
Charlie
iStruct Demonstrator
 Quelle: Daniel Kühn, DFKI
Quelle: Daniel Kühn, DFKI
Technical Details
| Size: | 66cm x 43cm x 75cm (standard position) |
| Weight: | 18 Kg |
| Power supply: |
44,4V / 2.5Ah (Lithium Polymer)
|
| Actuation/ Engine: |
8 * 48V RoboDrive motors with a 1:50 HarmonicDrive gear, 8 * 48V RoboDrive motors with a 1:80 HarmonicDrive gear, 4 BLDC Faulhaber-2250 motors as well as 6 BLDC Faulhaber 2444 Motors
|
| Sensors: |
Joints: Positions (absolute and relative), speed, current, supply voltage, temperature; Foot: 49 pressure sensors, a three axis acceleration sensor, one distance sensor, three absolute position sensors, one temperature sensor, and one 6DoF force-torque sensor; Spine: 2x6 Positions sensors (absolute and relative), 6x1DoF force sensors; Body: Inertial Measurement Unit, battery voltage
|
Organisational Details |
|
| Application Field: | Space Robotics |
| Related Projects: |
VIPE
Exploration in terrain difficult to access (e.g. Valles Marineris) using visual and proprioceptive data.
(05.2015- 06.2018)
|
| Related Software: |
Bagel
Biologically inspired Graph-Based Language
BOLeRo
Behavior Optimization and Learning for Robots
NDLCom
Node Level Data Link Communication
Rock
Robot Construction Kit
|
System description
 Quelle: Frank Beinersdorf, DFKI
Quelle: Frank Beinersdorf, DFKI
 Quelle: Felix Bernhard und Kristin Fondahl, DFKI
Quelle: Felix Bernhard und Kristin Fondahl, DFKI
One key benefit of legged robots is their ability to act on the environment by applying forces in a noncontiguous way in innumerous directions and magnitudes within their designed workspace. Most multi-legged robots are equipped with single-point-contact feet for the sake of simplicity in design and control.
This project focuses on a sophisticated lower limb system for a multi-legged robot to demonstrate the advantages of actuated multi-point-contact feet. The employed sensors include the pressure sensor array of 43 individual FSR-sensors, six additional FSR-sensors are located on exposed parts used for collision detection, a 6-axis Force/Torque-sensor, a distance sensor in the heel to anticipate the heel strike, a digital 3-axis accelerometer to perceive the orientation of the foot structure, two temperature sensors to compensate for the temperature influences in the involved electronics, and digital magnetic angular encoders to monitor every moving axes of the foot and ankle structure.
In addition, to increase the mobility towards a so-called multi-locomotion system, the rigid connection between the front and rear body will be replaced by an actuated spinal column. The mechanism is a 6-DoF parallel kinematic mechanism. The struts in the spine are arranged in such a way that only compression and tension forces occur. Hence, a single axis load cell can be integrated in line with each strut. Due to the embedded electronic in the spine the overall structure can be used as a 6-axes force-torque sensor.
Videos
Charlie: A self-righting behavior of the walking robot

The video shows a self-righting behavior of the four-legged walking robot Charlie, developed by the Robotics Innovation Center (RIC) of the DFKI. The behavior consists of two parts: 1. A transition from a supine lying pose to a prone lying pose and 2. subsequently the transition to a standing posture, where the 6DoF artificial spine of Charlie was key to reach the stable four-legged pose.The first transition has been optimized using state-of-the-art machine learning algorithms.
iStruct: Walking

The video shows the walking pattern of the iStruct Demonstrator. Besides different walking directions a smooth transition between the respective directions is realized.
iStruct: Balancing

The robot shifts its center of mass in realtime, based on the slope it is walking on.


