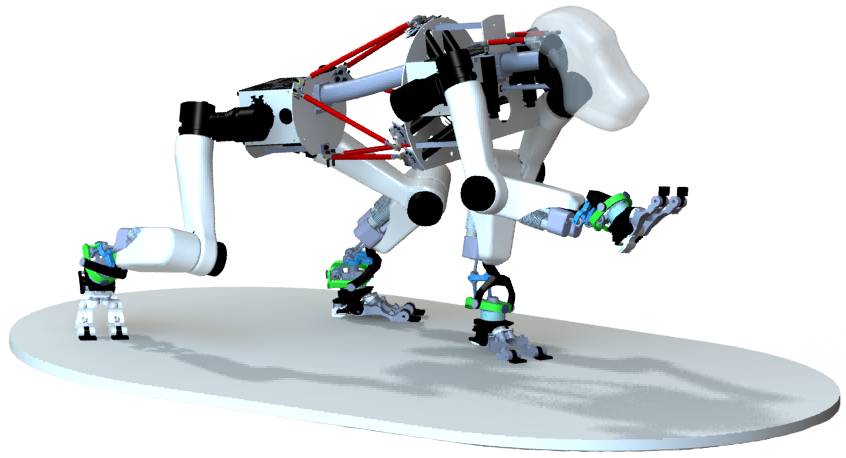
Charlie
iStruct Demonstrator
 Quelle: Daniel Kühn, DFKI
Quelle: Daniel Kühn, DFKI
Technische Details
Systembeschreibung
 Quelle: Frank Beinersdorf, DFKI
Quelle: Frank Beinersdorf, DFKI
 Quelle: Felix Bernhard und Kristin Fondahl, DFKI
Quelle: Felix Bernhard und Kristin Fondahl, DFKI
Einer der Vorteile von Laufmaschinen ist ihre Fähigkeit, Kräfte in
alle Richtungen und in verschiedenen Größenordnungen auf die Umgebung
aufzubringen. Viele der mehrbeinigen Roboter sind mit Punktkontakt-Füßen ausgestattet, da diese das Design und die Kontrolle des Roboters
vereinfachen. Im Projekt iStruct steht die Entwicklung eines Fußes im
Vordergrund, der einen flächigen Kontakt zur Umwelt erlaubt.
Zu den eingesetzten Sensoren gehört ein Drucksensorarray bestehend
aus 43 einzelnen FSR-Sensoren in der Fußsohle. Darüber hinaus gibt es
sechs zusätzliche FSR-Sensoren an exponierten Stellen zur
Kollisionserkennung, einen 6-Achs-Kraft/Drehmoment-Sensor, einen
Abstandssensor in der Ferse, um einen bevorstehenden Bodenkontakt zu
detektieren, einen digitalen 3-Achs-Beschleunigungsmesser, um die
Orientierung des Fußes wahrzunehmen, zwei Temperatur-Sensoren, um
Temperatureinflüsse in den beteiligten Elektroniken zu kompensieren und
digitale magnetische Encoder, die alle beweglichen Achsen des
Fußstruktur überwachen.
Um die Mobilität eines sogenannten „Multi-Lokomotionssystems” zu
erhöhen, wird die für Roboter typische starre verbindende Strukturen
zwischen dem Vorder- und Hinterkörper durch eine aktuierbare Wirbelsäule
ersetzt. Der Mechanismus ist eine 6-DoF parallel-Kinematik. Die
Streben sind in der Wirbelsäule so angeordnet, dass nur Druck-und
Zugkräfte auftreten können. Daher kann in jede Achse ein einachsiger
Kraftsensor integriert werden. Dank der integrierten Elektronik kann
die gesamte Struktur als ein 6-Achsen-Kraft-Momenten-Sensor verwendet
werden.
Videos
Charlie: Verhalten zum Wiederaufrichten des Laufroboters

Das Video zeigt ein selbstaufrichtendes Verhalten des vierbeinigen Laufroboters Charlie, der vom Robotics Innovation Center (RIC) des DFKI entwickelt wurde. Das Verhalten besteht aus zwei Teilen: 1. einem Übergang von einer liegenden in eine liegende Position und 2. dem anschließenden Übergang in eine stehende Position, wobei die künstliche 6 DoF-Wirbelsäule von Charlie der Schlüssel zum Erreichen der stabilen vierbeinigen Position war.
iStruct: Walking

Das Video zeigt den iStruct Demonstrator beim Laufen. Neben verschiedenen Laufrichtungen wurden auch fließende Bewegungen zwischen den jeweiligen Richtungen realisiert.
iStruct: Balancing

Der Roboter verschiebt seinen Schwerpunkt basierend auf der Schräglage, in der er sich befindet.


