ARTIS
Autonomous Railguided Tank Inspection System

Contact person:
Technical Details
| Size: | Varies, depending on attached modules. Typical configuration: 900 x 244 x 293 mm |
| Weight: | ~6 kg |
| Power supply: |
25,6 V 5000 mAh LiPo accumulator
|
| Actuation/ Engine: |
Brushed DC, 110 mNm, 36:1 planetary gear
|
| Sensors: |
High resolution pan-tilt panorama camera with in-house developed LED flash electronics (Prosilica GC2450C), Inertial Measurement Unit (Xsens Mti); Depending on application scenario: Laserscanner (Hokuyo UTM 30-LX), TOF-Distance camera (Mesa Imaging SR4000)
|
| Other: |
Waterproof 5 DOF manipulator
|
| further sensors: |
Oxygen sensor, Thickness measurement sensor
|
Organisational Details |
|
| Application Field: |
Underwater Robotics
Logistics, Production and Consumer |
| Related Projects: |
ROT
Robots in Tanks
(05.2009- 04.2011)
|
| This system is not actively used anymore. | |
System description
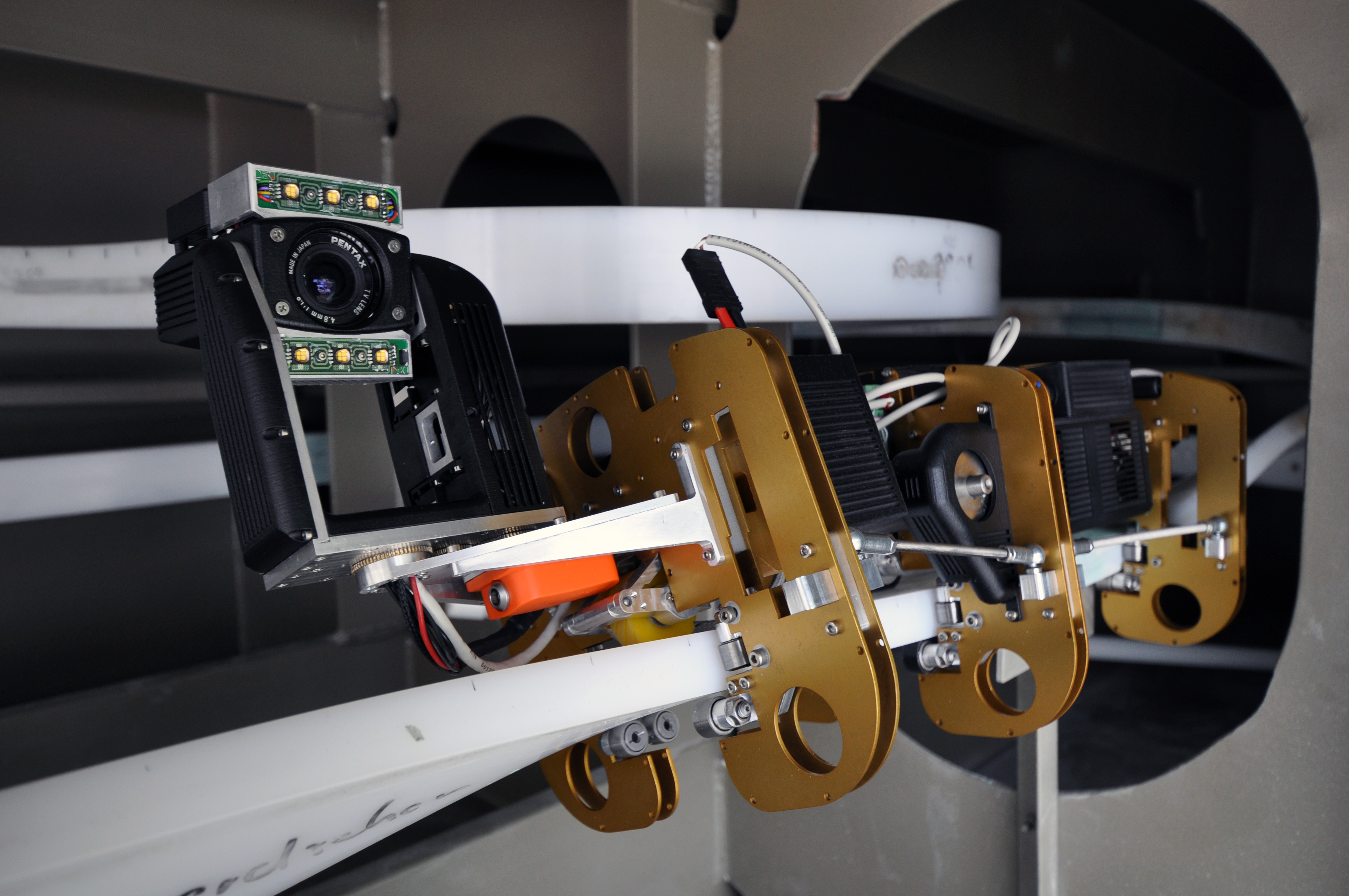


ARTIS is an autonomous robot demonstrating inspection and maintenance in confined and obstructed spaces as they appear in tanks on ships, especially in double bottom ballast water tanks. Due to these restrictions as well as the residue of ballast water (fouling gas, rust, mud, etc.), the inspection and maintenance is a time-consuming, expensive and dangerous task for humans.
This environment conditions makes it also hard for a robot to successfully operate there, since most of the common locomotion techniques could not be used. Therefore, ARTIS makes use of a cost-effective 3D rail system that can easily be installed in-place.
Videos
ARTIS: Tank inspection robot

By playing the video, you accept YouTube's privacy policy.
Conceptsimulation