ARTIS
Autonomous Railguided Tank Inspection System

Ansprechpartner/in:
Technische Details
| Größe: | Variierend je nach angekoppelten Modulen Typische Konfiguration: 900 x 244 x 293 mm |
| Gewicht: | ~6 kg |
| Stromversorgung: |
25,6 V 5000 mAh LiPo Akku
|
| Antrieb/ Motoren: |
Gleichstrom-Bürstenmotor, 110 mNm, 36:1 Planetengetriebe
|
| Sensoren: |
Schwenk- und neigbare hochauflösende Panoramakamera mit selbstentwickelter Blitzelektronik auf LED-Basis (Prosilica GC2450C), Lagesensor (XSENS MTi); Je nach Einsatzkonfiguration: Laserscanner (Hokuyo UTM 30-LX), TOF-Abstandskamera (Mesa Imaging SR4000)
|
| Sonstiges: |
Wasserdichter Roboterarm mit 5 Freiheitsgraden zum erreichen schwer zugänglicher Stellen
|
| weitere Sensoren: |
Sauerstoffsättigungssensor, Schichtdickenmessgerät
|
Organisatorische Details |
|
| Anwendungsfelder: |
Unterwasserrobotik
Logistik, Produktion und Consumer |
| Verwandte Projekte: |
ROT
Robots in Tanks
(05.2009- 04.2011)
ROT
Robots in Tanks
(05.2009- 04.2011)
|
| Dieses System ist nicht mehr aktiv im Einsatz. | |
Systembeschreibung
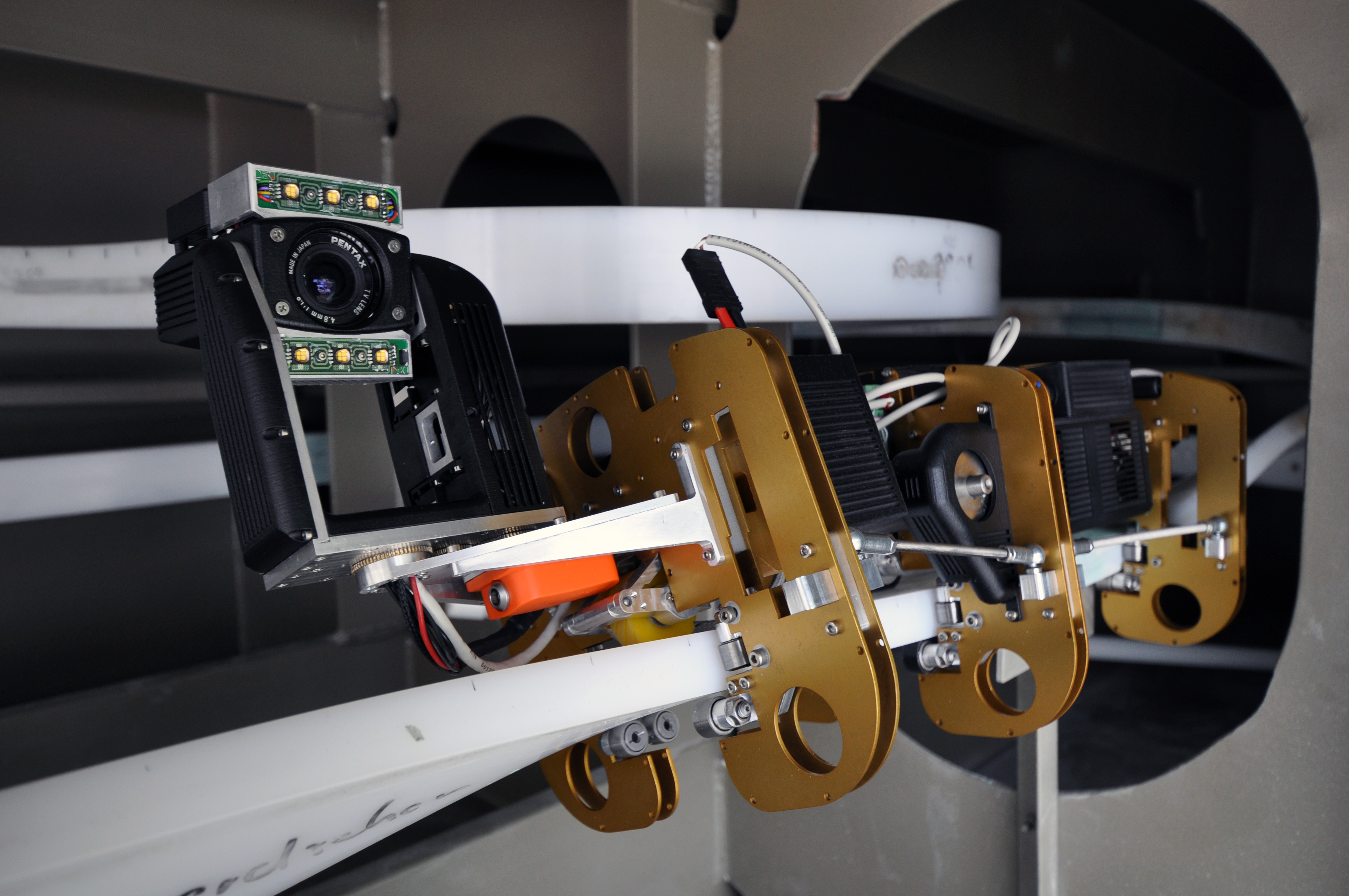


ARTIS ist ein autonomer Roboter zur Demonstration von Inspektion und Wartung in sehr beengten und verbauten Räumen wie sie in Tanks auf Schiffen, insbesondere Doppelboden-Ballastwassertanks vorkommen. Diese Räume sind aufgrund der Beengtheit und wegen der Überreste des Ballastwassers (Schlamm, Faulgas, Rost, etc.) für Menschen aufwendig und mit Risiko zu inspizieren und zu warten.
Auch an Roboter stellt diese Umgebung hohe Anforderungen, wobei viele herkömmliche Lokomotionsverfahren weitgehend ausscheiden. ARTIS nutzt daher eine frei und auch nachträglich verlegbares, kosteneffizientes 3D-Schienensystem.
Videos
ARTIS: Tankinspektionsroboter

Durch das Abspielen des Videos akzeptieren Sie die Datenschutzerklärung von YouTube.
Eine Konzeptsimulation.