Lunares
Reconfigurable Robots for Extraterrestrial Exploration

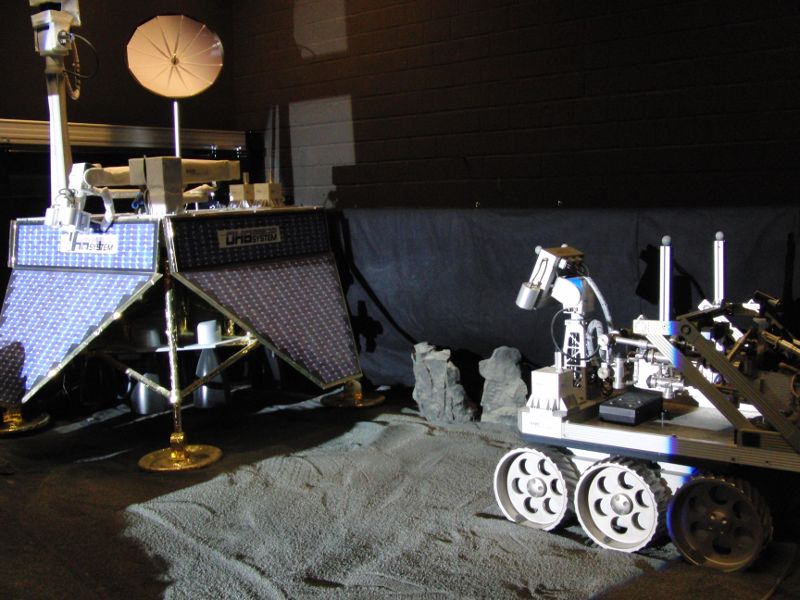
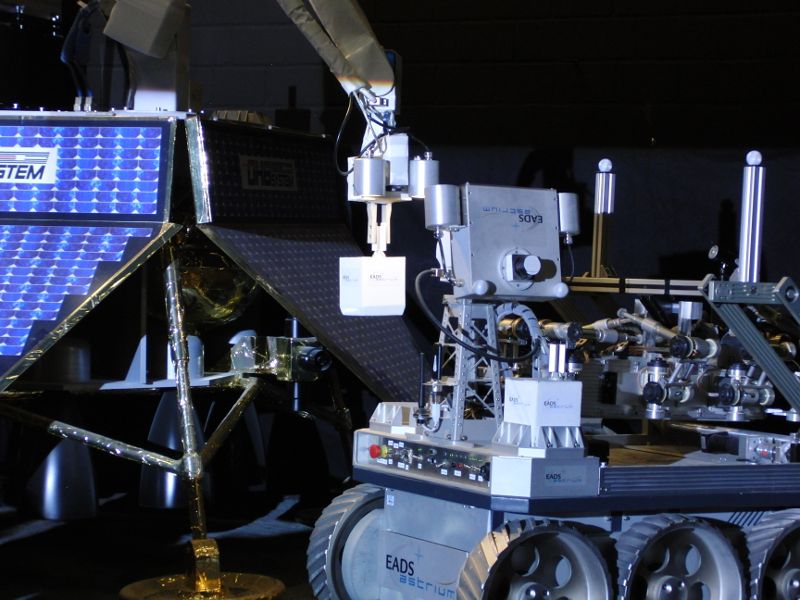
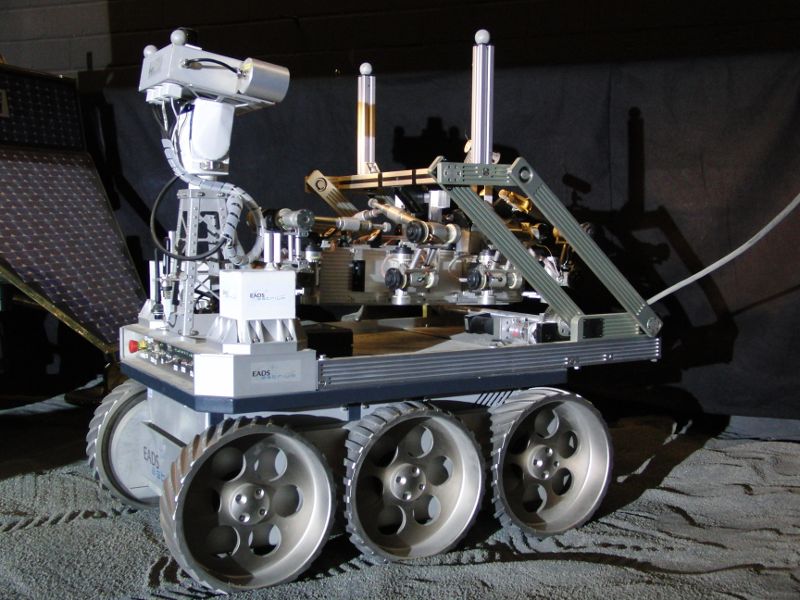
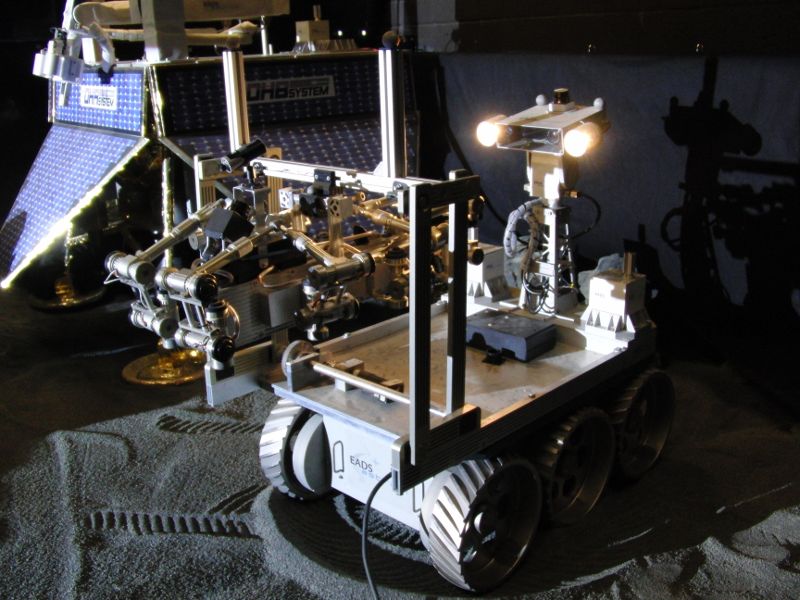
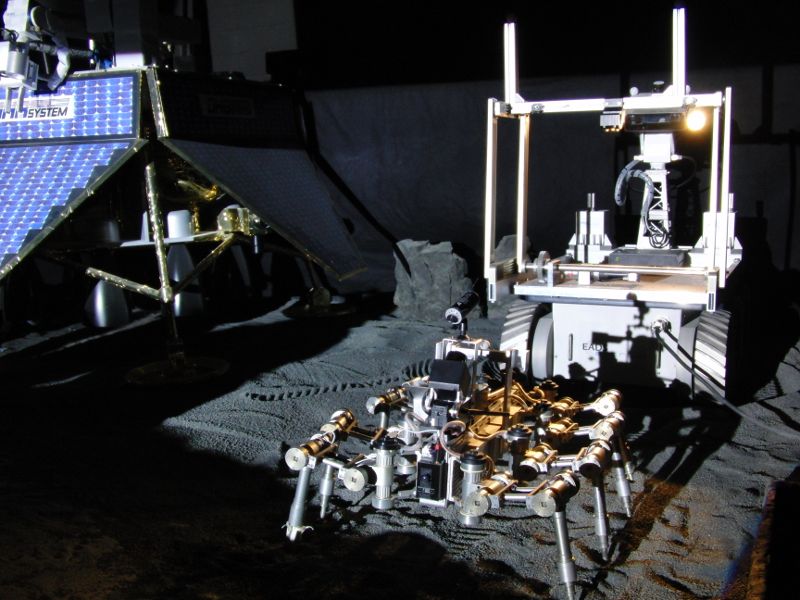
The aim of this project (funded by the DLR and BIG Bremen) is the evaluation of state-of-the-art robot technologies for future cooperative, heterogeneous, extraterrestrial missions with reconfigurable robots. In cooperation with our partners, a reconfigurable robot system consisting of a Lander (OHB) with manipulator, a Rover (EADS Astrium), and a climbing robot (DFKI) will be developed based on already existing robot systems. Its versatility and robustness will be tested and demonstrated in a replication of a crater exploration scenario.
| Duration: | 01.07.2007 till 31.12.2009 |
| Donee: | German Research Center for Artificial Intelligence GmbH |
| Sponsor: |
German Aerospace Center e.V.
Federal Ministry of Economics and Technology BIG Bremen |
| Grant number: | The project Lunares is funded by the Deutsches Zentrum für Luft- und Raumfahrt (DLR) (grant no. 50RA0706) and the BIG Bremen (grant no. INNO1036A). |
| Partner: | EADS Astrium GmbH, OHB System AG |
| Application Field: | Space Robotics |
| Related Projects: |
AMOR
Acquisition of Moon Oxygen Resources
(04.2007-
10.2007)
SCORPION
An Eight-Legged Robot for Hazardous Outdoor-Terrain
(01.2001-
12.2005)
SpaceClimber
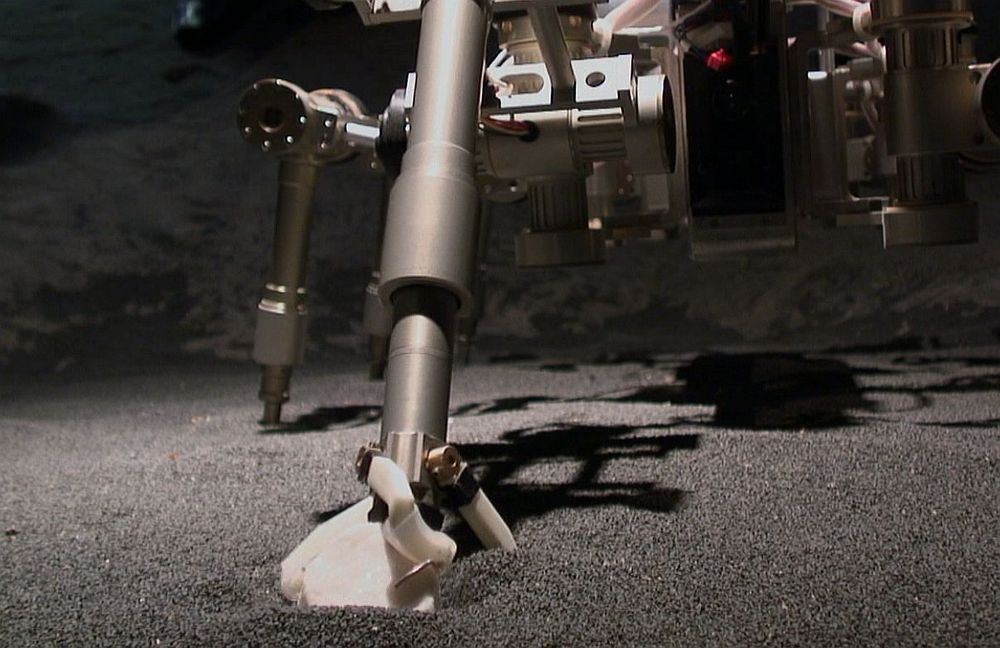
A Semi-Autonomous Free-Climbing Robot for the Exploration of Crater Walls and Bottoms
(09.2006-
09.2009)
|



Project details


The aim of the Lunares project is to evaluate different state-of-the-art robot technologies that can be specifically employed for the exploration of lunar craters. In this project, the German Research Center for Artificial Intelligence (DFKI GmbH) is cooperating in a partnership with Astrium GmbH and OHB-System AG.
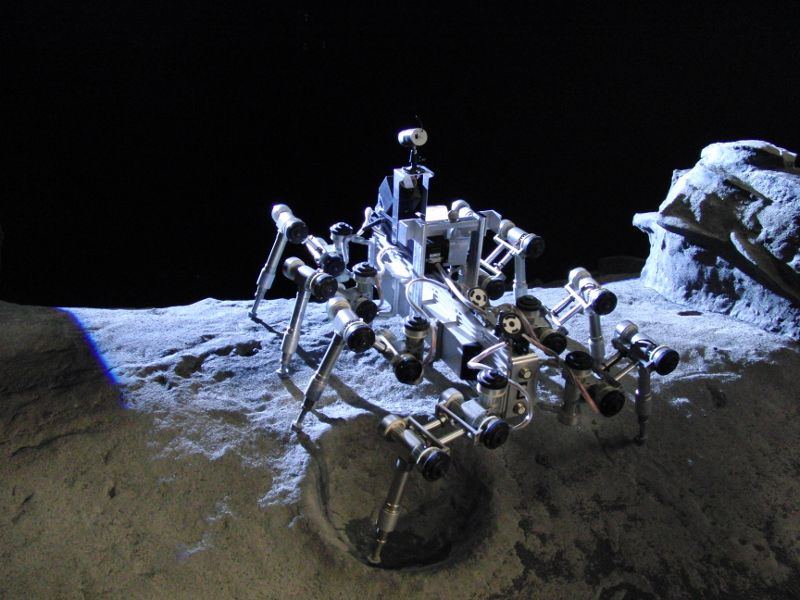
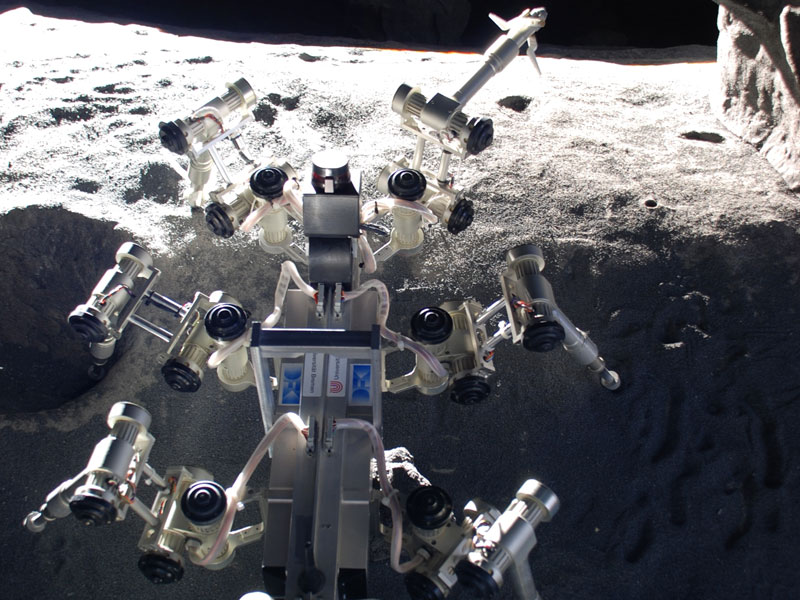
A robot team consisting of a manipulator arm (Astrium), which is mounted on a lander (OHB-System), a rover (Astrium), and a legged robot (DFKI) will be tested in a realistic environment reproducing a lunar surface. This exploration scenario will serve as a "Proof of Concept" for future cooperative and heterogeneous lunar missions using reconfigurable robots.
Lunares will demonstrate how the already-existing robotic capabilities of the cooperating partners are able to support scientific exploration on a planetary surface, and how these can be combined in order to create a complete robotic system usable for different tasks ranging from autonomous in-situ examinations to remote-controlled actions from an existing control center.
To test these and future robotic systems, a realistic test environment reproducing a lunar crater will be set up, where the versatility and robustness of this reconfigurable robot system will be investigated and demonstrated.
Videos
Lunares: Reconfigurable robots for extraterrestrial exploration

Reconfigurable Robots for Extraterrestrial Exploration